Biomedical Engineering Reference
In-Depth Information
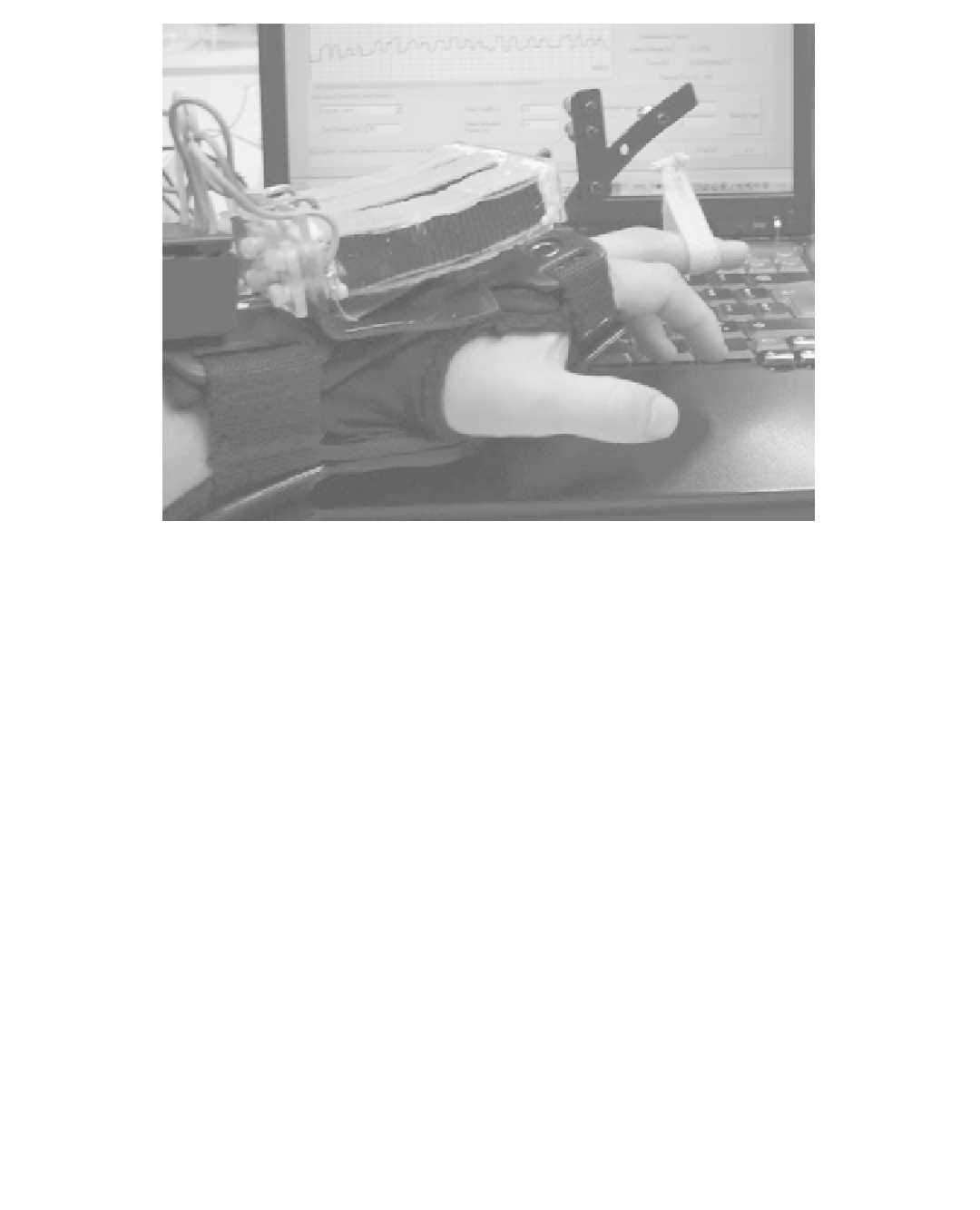
FIGURE 16.13
Prototype sample of a dynamic hand splint equipped with dielectric elastomer actuators.
16.7 CONCLUSIONS
This chapter has provided a brief survey about the most promising types of EAP, which are cur-
rently being studied for potential biomedical applications. They may fi nd suitable uses for different
kinds of tasks where materials with intrinsic actuation properties, controllable by external stimuli,
are required. The main features of such materials, along with the state of the art of their related
technology, have been presented. Although several interesting applications could be enabled by
the use of these classes of polymers, basic challenging issues actually limit their applicability at
present. In particular, polymer gels and IPMC typically offer high strains but low stresses, while an
opposite behavior is shown by conducting polymers. These ionic EAP share low-driving voltages,
particularly advantageous for a biological environment. Nevertheless, they also share low-response
speeds, due to a diffusion-based control of their actuation mechanism, and poor effi ciencies and
durability, due to the electrochemical nature of the activation. On the contrary, dielectric elastomer
actuators offer considerably superior electromechanical performances consisting of large, fast, and
stable strains at moderate stresses. However, as a counterpart, they are characterized by the need of
very high driving voltages, which discourage the use of this technology for intrabody applications.
As a conclusion, it can be argued that an “optimal” EAP is not available at present and the selection
of the most suitable material should be made according to the specifi c application of interest.
REFERENCES
1. Bar-Cohen Y. (Ed.), Electroactive polymer (EAP) actuators as artifi cial muscles.
Reality, Potential, and
Challenges
. Second edition, Bellingham, WA: SPIE Press (2004).
2. Madden J. D. W. et al., Artifi cial muscle technology: physical principles and naval prospects,
IEEE J.
Oceanic Eng.
, 29 (3), 706-728 (2004).