Biomedical Engineering Reference
In-Depth Information
1.2
1.0
0.8
0.6
0.4
0.2
0.0
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
Time (s)
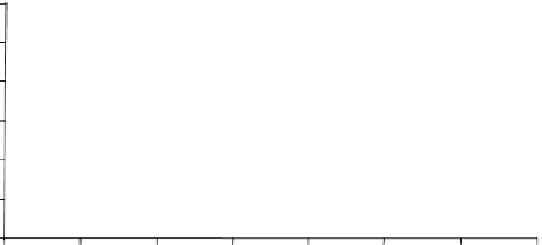
FIGURE 13.12
Modulation of PPy expansion or contraction with incident light.
Figure 13.12, the time response of the microactuator (
τ
) is approximately 10 s. The time response
of the electrochemically actuated PPy depends primarily on mass transport through the polymer
matrix, in this case diffusion of Na
+
ions. It follows that if the actuator is scaled down, the diffusion
time should decrease as well. In Section 13.4, a method to fabricate PPy rods with a diameter of
200 nm is described. These structures have a time constant (for complete electrochemical oxidation
or reduction) at least two orders of magnitude smaller than the microactuator, bringing it closer to
the time response of biological muscle (10-100 ms).
13.3 POLYPYRROLE MICROACTUATORS
13.3.1 B
ILAYER
A
CTUATORS
A signifi cant amount of progress has been made in the design of devices utilizing micromuscles of
a bilayer PPy(DBS) and gold for operation in aqueous electrolytes.
1,12
These devices are based on
the application of planar photolithographic microtechnology to fabricate microstructures similar
to the process outlined in Section 13.2. Thin fi lms of PPy are electropolymerized on patterned gold
fi lms, which either have a weak adhesion to the substrate or are detached from the substrate by
dissolution of a sacrifi cial thin fi lm underlying the gold.
5
Bilayer fi lms fabricated in this manner
can remain attached to the substrate at one end, while the other end can carry a useful load such
as a silicon or a polymer rigid plate. They have been utilized in devices ranging from microvalves
to microrobots. An interesting application of this technology is the design of “cell clinic,” which
is a micromachined well that can be opened and closed with a microlid mounted on a PPy/Au
microactuator. The authors expect to use this device for confi nement and the study of individual
cells, including electrical impedance measurements and optical observation of cellular response to
mechanical stress. Microbilayer technology was also used to make more complex robotic device
such as the microarm capable of gripping and moving small objects in an electrolyte.
12
Several
individually controlled microactuators were used to control the movement of the robotic “hand” to
pick up and move small objects such as glass microbeads.
The ability to fabricate and control many microactuators simultaneously is an important feature
that makes PPy micromuscles suitable as active components of microfl uidic systems. A typical
microfl uidic system for such applications as a lab-on-a-chip or remote sensing will utilize relatively
long microchannels with width and depth of only a few tens of micrometers or less. Typical fabri-
cation materials include glass, quartz, silicon, as well as polymer materials such as polycarbonate
and polymethylmethacrylate (PMMA).
13
Also, a high number of microfl uidic devices are fabricated
using polydimethylsiloxane (PDMS), which is a transparent elastomer.
14
This material has many