Java Reference
In-Depth Information
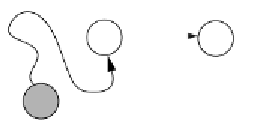
Figure 14.20 illustrates a fundamental principle: If a path to vertex
v
has
cost
D
v
and
w
is adjacent to
v
,
then there exists a path to
w
of cost
D
w
=
D
v
+ 1.
All the shortest-path algorithms work by starting with
D
w
=
∞
and reducing its
value when an appropriate
v
is scanned. To do this task efficiently, we must scan
vertices
v
systematically. When a given
v
is scanned, we update the vertices
w
adjacent to
v
by scanning through
v
's adjacency list.
From the preceding discussion, we conclude that an algorithm for solving
the unweighted shortest-path problem is as follows. Let
D
i
be the length of the
shortest path from
S
to
i
. We know that
D
S
= 0 and that
D
i
=
The
roving eyeball
moves from vertex
to vertex and
updates distances
for adjacent verti-
ces.
∞
initially for all
i
S
. We maintain a
roving eyeball
that hops from vertex to vertex and is ini-
tially at
S
. If
v
is the vertex that the eyeball is currently on, then, for all
w
that
are adjacent to
v
,
we set
D
w
=
D
v
+ 1 if
D
w
=
≠
∞
. This reflects the fact that we
can get to
w
by following a path to
v
and extending the path by the edge
(
v
,
w
)—again, illustrated in Figure 14.20. So we update vertices
w
as they are
seen from the vantage point of the eyeball. Because the eyeball processes each
vertex in order of its distance from the starting vertex and the edge adds
exactly 1 to the length of the path to
w
,
we are guaranteed that the first time
D
w
is lowered from
∞
, it is lowered to the value of the length of the shortest
path to
w
. These actions also tell us that the next-to-last vertex on the path to
w
is
v
,
so one extra line of code allows us to store the actual path.
After we have processed all of
v
's adjacent vertices, we move the eyeball
to another vertex
u
(that has not been visited by the eyeball) such that
. If that is not possible, we move to a
u
that satisfies . If
that is not possible, we are done. Figure 14.21 shows how the eyeball visits
vertices and updates distances. The lightly shaded node at each stage repre-
sents the position of the eyeball. In this picture and those that follow, the
stages are shown top to bottom, left to right.
D
u
D
v
≡
D
u
=
D
v
+
1
The remaining detail is the data structure, and there are two basic actions
to take. First, we repeatedly have to find the vertex at which to place the eye-
ball. Second, we need to check all
w
's adjacent to
v
(the current vertex)
throughout the algorithm. The second action is easily implemented by iterat-
ing through
v
's adjacency list. Indeed, as each edge is processed only once,
All vertices adja-
cent to
v
are found
by scanning
v
's
adjacency list.
figure 14.20
If
w
is adjacent to
v
and there is a path to
v
,
there also is a path
to
w.
D
v
+1
D
v
v
w
0
S





Search WWH ::

Custom Search