Geoscience Reference
In-Depth Information
chemical engineering literature as a “continuous stirred tank reactor” (CSTR). This has been
used widely as a model of the residence time distribution since.
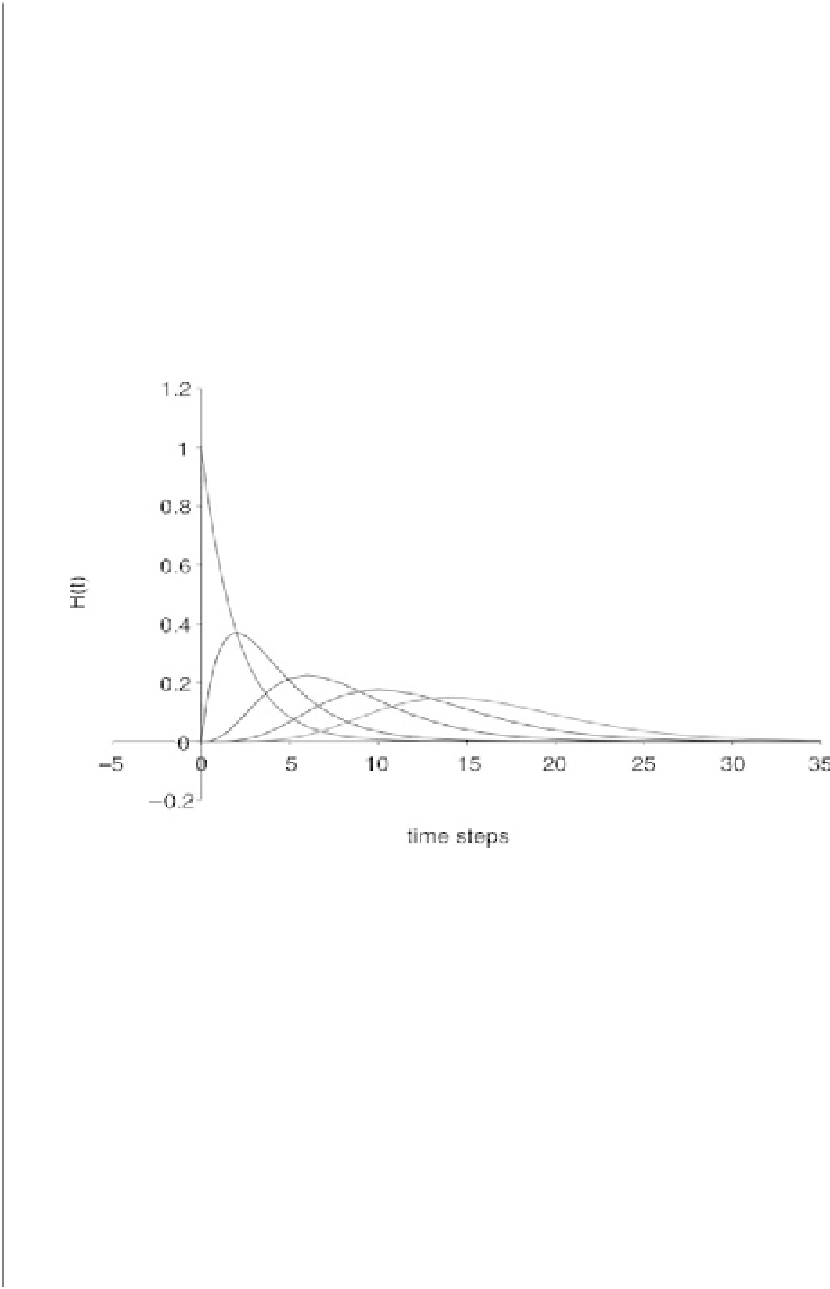
A more general form, which includes the exponential distribution as a special case, but
which involves more parameters, is the gamma distribution:
t
K
N
−1
exp(
−
t/K
)
K
(
N
)
f
(
t
)
=
(B11.2.4)
where
(
N
) is the gamma function (
(
N
)
1)! for integer values of
N
). This form was also
used as a functional form for the unit hydrograph (Equation 2.2) but the parameters for
f
() for
predicting residence time distributions are not the same as
h
() for predicting hydrographs. The
general linear transfer function models of Box 4.1 could also be used (Young and Wallis, 1993;
Young, 2011a; see also Amin and Campana, 1996). The way in which the gamma distribution
changes shape for different values of the parameters
K
and
N
is shown in Figure B11.2.1. A
third, time shift, parameter can also be introduced.
=
(
N
−
Figure B11.2.1
Forms of the gamma distribution for different values of the parameters K and N.
A number of packages exist to fit residence time distributions to tracer concentration ob-
servations (e.g. Maloszewski and Zuber, 1993; Ozyurt and Bayari, 2005a; the TFM package
(Appendix A) could also be used to fit ADZ models). A particularly strong assumption in fitting
a distribution to time series of inputs and outputs is that the residence time distribution used
should be linear and stationary. Linearity means that there is a constant scaling of the integrated
inputs and outputs; stationarity means that the distribution is treated as constant in time. These
assumptions simplify the fitting process (only a small number of parameters need to be fitted
once a distributional form has been chosen) but are not true. A number of studies have com-
pared the use of different distributional forms to data under these assumptions but there have
been few studies that have evaluated the effect of the linearity and stationarity assumptions on
the inferred residence times in the catchment.
It is well known from the theory of linear systems that the fitting of convolution kernels,
such as the residence time distribution
f
(
t
) of interest here, to noisy data can be improved
by the inherent filtering involved in the use of Fourier or Laplace transforms (for applications
in this area see e.g. Eriksson, 1971; Duffy and Gelhar, 1985; Kirchner, 2005). The type of