Hardware Reference
In-Depth Information
Final
Goto
Micro-op
ROM
index
IJVM
length
Queueing unit
3
1
2
From
memory
Micro-operation ROM
IADD
ISUB
ILOAD
IFLT
Instruction
fetch unit
Decoding unit
Queue
of pending
micro-ops
To/from
memory
Drives stage 4
M
AB
MIR1
ALU
C
4
Registers
7
MIR2
ALU
C MAB
Drives stage 5
C
MAB
Drives stage 6
ALU
MIR3
6
MIR4
ALU
C
M
AB
Drives stage 7
C
A
B
ALU
5
Shifter
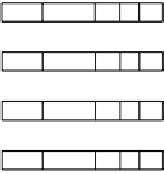
Figure 4-35.
The main components of the Mic-4.
The micro-operations are similar to the microinstructions of Fig. 4-5 except
that the
NEXT ADDRESS
and
JAM
fields are absent and a new encoded field is need-
ed to specify the A bus input. Two new bits are also provided: Final and Goto.
The Final bit is set on the last micro-operation of each IJVM micro-operation se-
quence to mark it. The Goto bit is set to mark micro-operations that are condi-
tional microbranches. They have a different format from the normal micro-opera-
tions, consisting of the
JAM
bits and an index into the micro-operation ROM.
Microinstructions that previously did something with the data path and also per-
formed a conditional microbranch (e.g.,
iflt4
) now have to be split up into two
micro-operations.
The queueing unit works as follows. It receives a micro-operation ROM index
from the decoding unit. It then looks up the micro-operation and copies it into an
internal queue. Then it copies the following micro-operation into the queue as
well, and the one after it too. It keeps going until it hits one with the Final bit on.
It copies that one, too, and stops. Assuming that it has not hit a micro-operation