Hardware Reference
In-Depth Information
Registers loaded from
C bus and memory on
rising edge of clock
Shifter
output
stable
Cycle 1
starts
here
Clock cycle 1
Clock cycle 2
New MPC used to
load MIR with next
microinstruction here
Δ
w
Δ
x
Δ
y
Δ
z
MPC
available
here
Set up
signals
to drive
data path
ALU
and
shifter
Drive H
and
Bbus
Propagation
from shifter
to registers
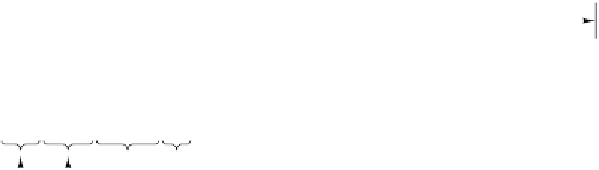
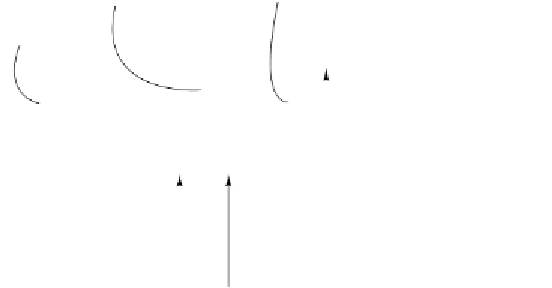
Figure 4-3.
Timing diagram of one data path cycle.
B bus does not cause the C bus to change until a finite time later (due to the finite
delays of each step). Consequently, even if a store changes one of the input regis-
ters, the value will be safely tucked away in the register long before the
(now-incorrect) value being put on the B bus (or
H
) can reach the ALU.
Making this design work requires rigid timing, a long clock cycle, a known
minimum propagation time through the ALU, and a fast load of the registers from
the C bus. However, with careful engineering, the data path can be designed so
that it functions correctly all the time. Actual machines work this way.
A somewhat different way to look at the data path cycle is to think of it as bro-
ken up into implicit subcycles. The start of subcycle 1 is triggered by the falling
edge of the clock. The activities that go on during the subcycles are shown below
along with the subcycle lengths (in parentheses).
1. The control signals are set up (
w
).
2. The registers are loaded onto the B bus (
Δ
Δ
x
).
3. The ALU and shifter operate (
y
).
4. The results propagate along the C bus back to the registers (
Δ
Δ
z
).
The time interval after
z
provides some tolerance since the times are not exact.
At the rising edge of the next clock cycle, the results are stored in the registers.
Δ