Environmental Engineering Reference
In-Depth Information
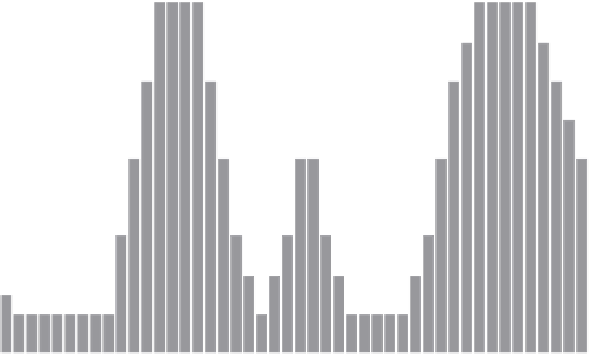
Piecewise constant control profile
1
Values
0.8
0.6
0.4
0.2
0
2
4
6
8
10
12
14
16
18
20
22
24
Time (h)
Figure 5.3
Example of a piecewise constant control variable profile
for complex energy service networks such as the ones modelled in this research,
thus allowing the TCOPF program to reach an optimal solution after a few iterations
independent of network size or topology.
The gPROMS
TM
CVP-SS solver involves the following steps when implement-
ing its optimisation algorithm [215]:
Starting from the initial time interval, the optimisation algorithm is solved
over the entire time horizon by analysing and deciding the time-variation of
all variables;
●
The optimiser determines when and for how long the control variables should be
active, as well as calculating the values of these control variables;
●
The previous information is used to determine the values of:
-
●
The proposed scalar-valued objective function;
-
All the constraints that have to be satisfied by the optimisation algorithm;
Based on the above data, the solver revises the choices it made at the first iteration
and the procedure is repeated until convergence to the optimum is achieved.
●
.
5.1.3 Input data and assumptions of the TCOPF tool
In order to execute the optimisation program, the TCOPF code requires a set of
input data (
i.e.
one- or two-dimensional arrays) to process and calculate the optimal
operating values of the energy service networks and their embedded technologies.











Search WWH ::

Custom Search