Graphics Reference
In-Depth Information
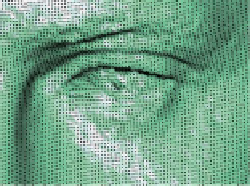
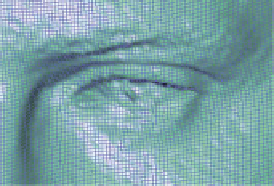
Texture image
Depth image
3D mesh
Textured surface
Cloud of 3D points
Figure 1.4
One example of 3D face acquisition based on laser stripe scanning (using Minolta VIVID
910). Different representations are given, from the left: texture image, depth image, cloud of 3D points,
3D mesh, and textured shape
The Charged Couple Device (CCD) is the widely used light-receiving optical system to
digitize the point laser image. CCD-based sensors avoid the beam spot reflection and stray
light effects and provide more accuracy because of the single-pixel resolution. Another factor
that affects the measurement accuracy is the difference in the surface characteristic of the
measured object from the calibration surface. Usually calibration should be performed on
similar surfaces to ensure measurement accuracy. Using laser as a light source, this method
has proven to be able to provide measurement at a much higher depth range than other passive
systems with good discrimination of noise factors. However, this line-by-line measurement
technique is relatively slow. The laser-based techniques can give very accurate 3D information
for a rigid body even with a large depth. However, this method is time consuming for real
measurement since it obtains 3D geometry on a line at a time. The area scanning-based
methods such as time-coded structured light (see section 1.3.2) are certainly faster.
An example of acquired face using these technique is given by Figure 1.4. It illustrates
the good quality of the reconstruction when office environment acquisition conditions are
considered, the subject is distant of 1 m from the sensor and remains stable for a few seconds.
1.3.2 Time-coded Structured Light
The most widely used acquisition systems for face are based on structured light by virtue of
reliability for recovering complex surface and accuracy. That consists in projecting a light
pattern and imaging the illuminated object, a face for instance, from one or more points of