Graphics Reference
In-Depth Information
where
x
is the input to the node
i
,
A
the linguistic label (antecedent) associated with
this node function. In terms of the choice of membership function characteristics,
Jang [47] proposes the typical bell-shaped function, which is adopted in this research
and found to be adequate with minor adjustments.
For practical applications, the modelling approach using ANFIS is similar to many
system identification techniques. First, a hypothetical parameterised model structure
that relates the inputs to membership functions to rules to outputs to membership
functions is selected. Thereafter, a set of input-output data collected from an experi-
ment is used for the ANFIS training. A portion of the same set of data is reserved
for validation of the derived system model. In an iterative manner, the FIS model can
be trained to emulate the data presented to it by modifying the membership function
parameters according to a chosen error criterion.
4.4
EXPERIMENT RESULTS
4.4.1
t
ime
d
elay
n
euRal
n
etwoRks
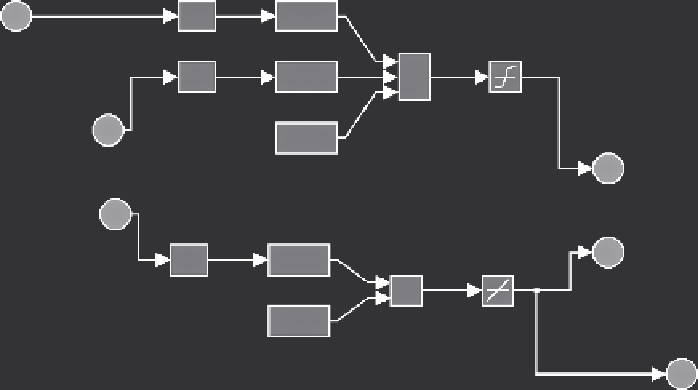
The neural network used to model the first application consisted of a MLP network
with two layers, six units, and three delay units in each of the input and output chan-
nels. The second neural network differed and contained just four delay units in both
the input and output channels. The neural network used to model the first application
is shown in Figure 4.7.
In Figure 4.8, the diagrams at top right and bottom right show the measured and
predicted output frame rates of the application and neural network, respectively. The
difference between them is shown in the graph at bottom left. The graph in the top
left corner shows the input (triangle count per frame) to the neural network model
1
p{1}
TDL
Delays 1
weight
IW{1,1}
+
+
+
TDL
Delays 2
weight
tansig
LW {1,2}
netsum
2
a{2}
bias
Layer 1
1
a{1}
b{1}
3
a{1}
2
a{2}
TDL
Delays 3
weight
LW{2,1}
+
+
netsum
bias
b{2}
purelin
Layer 2
3
y{1}
FIGURE 4.7
Neural network in Experiment 1.
Search WWH ::

Custom Search