Graphics Reference
In-Depth Information
x
1
y
1
Output
Vector
Input
Vector
y
2
x
2
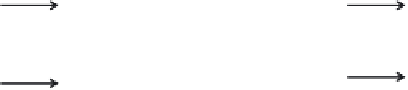
FIGURE 4.6
Adaptive network.
The adaptive neuro-fuzzy inference system was introduced by Jang [47]. It is
essentially a fuzzy inference system implemented in the framework of adaptive net-
works. The proposed architecture utilises a learning procedure of the adaptive net-
work which is a superset of general feed-forward neural networks with supervised
learning capability.
Based on this adaptive design, the outputs of the framework depend on parameters
pertaining to the nodes involved and the learning rule specifies how the parameters
should change to minimise a prescribed error metric. The back-propagation algorithm
or least square method may be used in such computation. The relative advantage is
that this technique is capable of automatically constructing an input-output map-
ping based on both human knowledge and experimental data. Figure 4.6 presents the
design of a basic ANFIS.
The mathematics behind the ANFIS architecture is described as follows. First,
we assume a given adaptive network with L layers and k nodes in the
K
th layer. We
use the notation (
k, i
) to describe the node at the
i
ith position of the
K
ith layer with its
node function
O
i
k
. In neural networks, node output is determined by the input signals
and the note parameter set. Hence we denote this output by
y
i
k
:
(
)
k
k
k
−
1
k
−
1
yOOOabc
i
=
,,
…
,,,
…
(4.7)
i
i
k
1
where
a
,
b
,
c
… are the parameters of this node. Next, assuming the given data has
P
entries, the error metric for the
p
th
entry may be defined as the sum of squared errors:
L
∑
1
(
)
2
L
E
=
T
−
O
(4.8)
p
mp
,
mp
,
m
=
L
T
m
,
p
is the
m
th component of the
p
th target output vector, and
O
mp
,
is the
m
th compo-
nent of the actual output vector produced by the presentation of the
p
th input vector.
The overall error measure is given by:
P
∑
1
EE
p
=
(4.9)
p
=

































Search WWH ::

Custom Search