Graphics Reference
In-Depth Information
+
-
370
PID(z)
n4s2
Scope
Constant
Subtract
Discrete PID
Controller
Idmodel
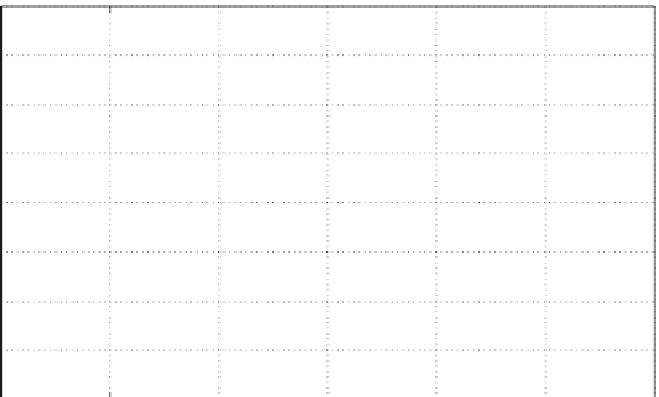
FIGURE 3.15
(See colour insert.)
SISO control system in Experiment 3.
Simulated Reference Tr acking with Controller
400
350
300
250
200
150
100
50
Reference
Controlled Output
0
0
0.5
1
1.5
2
2.5
3
×10
4
Frame
FIGURE 3.16
Simulated reference tracking with PID controller.
on a different computer and communicated with the rendering process via a network
link using the transmission control protocol (TCP). The purpose of such a modi-
fied design was to avoid the interference and loading of the rendering process from
MATLAB computation. The output of this experiment is shown in Figure 3.17.
Note from Figure 3.17 that the actual rendering application tracks the pre-defined
reference level accurately as in the previous case. The steady-state error is negligible
(less than 1% of the reference value), further reinforcing the validity of our system
model and control framework.
3.7
DISCUSSION
One challenge we faced in this research was the stability of frame rates during data
collection. We noted that frame rates on certain computers fluctuated even with-
out changes in input geometry or user-controlled events such as mouse movement





























Search WWH ::

Custom Search