Graphics Reference
In-Depth Information
TABLE 3.3
(Continued)
Parameters of State Space Model in Experiment 1
u1
x4
-21.457
x5
18.773
x6
-1.8395
x7
-0.85923
x8
-0.89561
x9
1.1259
Operating
point
u = 1.4552 × 10
6
, y = 14.6932
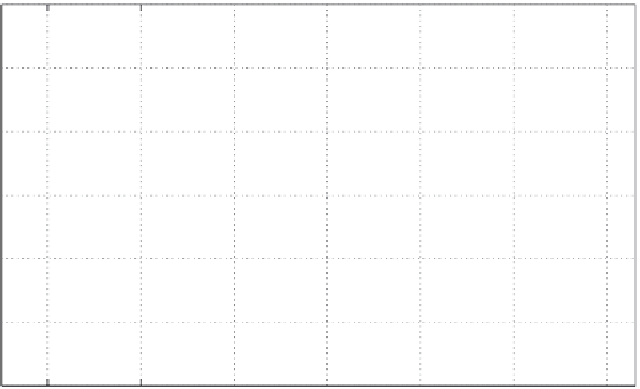
Frame Rate vs Ve rtex Count (at various Shader Complexity Va lues)
600
Shader complexity = 2
Shader complexity = 4
Shader complexity = 6
500
400
300
200
100
0
1
2
3
4
5
6
7
×10
5
Vertex Count
FIGURE 3.10
(See colour insert.)
Steady-state outputs of the system based on selected
combinations of two input variables.
output is shown in Figure 3.12. We can observe that the simulated output tracks
the measured output very closely—generally less than 2 FPS. Table 3.4 illustrates
model parameters.
In Figure 3.11, the top and middle diagrams show the variations of the inputs to
the rendering system while the bottom diagram shows the corresponding changes
in the output. It can be seen that both inputs are varying during the experiment
and none is held constant. This is to ensure that the data captured is representative
of a MISO system model. In Figure 3.12, the top diagram shows the compari-
son of the output of the system model derived from the experiment data and the
actual measured output. It can be observed that the simulated model output is very





















Search WWH ::

Custom Search