Environmental Engineering Reference
In-Depth Information
0.08
w
es
i
0
-0.08
0
100
200
300
400
0
i
359
(a)
12.247449
20
I
qs
i
I
ds
i
10
0
-10
-12.24728
-20
0
100
200
300
400
0
i
359
(b)
10
10
I
a
i
I
c
i
0
I
b
i
-9.999957
-10
150
160
170
180
190
200
210
220
i
150
220
(c)
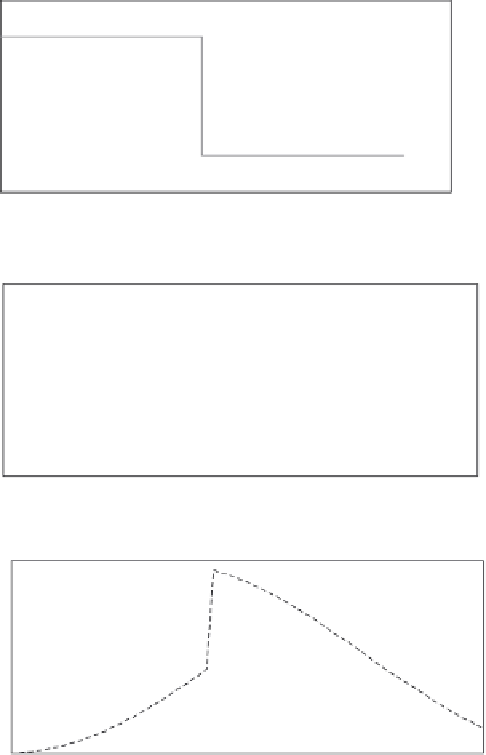
Figure 7.11 Dynamic response to speed change. (a) Synchronous frame command
on speed reversal. (b) The d-q-phase variables during speed
reversal. (c) Response of M/G phase currents during reversal
(expanded trace)
11 bit word length required to resolve position, but bit rate is very high in the case
of M/Gs rated for 13,000 rpm. Then high bandwidth resolvers are necessary that
have sufficient bit rate to deliver accurate position information to the controller at
very fast update rates.
Variable and switched reluctance machines can have even more stringent
position sensing requirements than the permanent magnet machines. Many hybrid