Environmental Engineering Reference
In-Depth Information
2.5
2.0
Sw
e
1.5
I
1.0
Byoke
0.5
T
,
B
g
0
0
1,800
3,600
5,400
7,200
9,000
Speed (rpm)
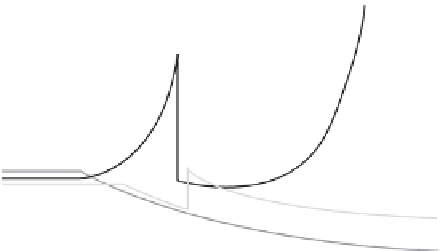
Figure 5.42 IM electrical and magnetic variables during electronic pole change
In Figure 5.42 the machine current is held constant at 1.0 pu over the entire
speed range of
>
4:1 for an IM that has a breakdown torque to rated torque ratio of
2:1. The machine torque and airgap flux density over the complete range are shown
as the same trace, but yoke flux density encounters a step change in magnitude
when the machine is reconfigured from 4-pole to 2-pole at 3,600 rpm. The stator
yoke flux in a 2-pole machine is two times the flux density in a 4-pole machine at
3,600 rpm. Lastly, the machine slip is shown rising from rated slip at the 4-pole
machine configuration to twice rated slip at 3,600 rpm, the extent of its field
weakening range. The slip in 2-pole configuration is shown rising to nearly 2.5 pu
to illustrate the fact that IMs are capable of this range in slip control.
Not shown in Figure 5.42 is the inverter control required to manage the
flux linkages in the machine during the pole changeover. The controller must
regulate
d
-axis current into the machine to restore the flux to rated value of a 2-pole
machine at 3,600 rpm. With such continuous excitation, there will be a transient in
currents and flux linkages lasting for approximately one rotor time constant as
the flux re-establishes itself to a new steady state. The ability to reconfigure pole
number without loss of excitation is one of the major benefits of electronic
pole changing, a benefit that is as important for industrial machine tool drives as it
is for battery electric and hybrid electric propulsion systems.
5.4.3.3 Pole-phase modulation
PPM is the most general method for discrete speed control of an ac machine fed
from a constant frequency source. Referring again to Figure 5.39, let
p
1
denote the
number of pole pairs and
m
1
the number of phases at one synchronous speed and
p
2
the number of pole pairs and
m
2
the number of phases at the second synchronous
speed, then the various combinations of PPM can be explained as follows. Not only
does it enable a variation of pole numbers, but the number of phases can change
along with the number of poles. PPM can be implemented in machines with