Environmental Engineering Reference
In-Depth Information
Pole-phase modulation:
p
1
and
p
2
arbitrary;
m
1
and
m
2
arbitrary
Pole-amplitude modulation:
p
1
:
p
2
=
n
: (
n
1)
m
1
=
m
2
Dahlander connection:
p
1
:
p
2
= 1 : 2;
m
1
=
m
2
Separate windings:
p
1
and
p
2
arbitrary;
m
1
and
m
2
arbitrary
Poor slot area utilization
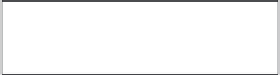
Figure 5.39 Hierarchy of discrete speed control methods
number are arbitrary. In Figure 5.39 the hierarchy of discrete speed control methods
is listed for an ac machine.
In general, discrete speed change by winding reconfiguration has been applied
to conventional drum type machines with single, double or higher number of layer
windings. The PPM technique can be applied equally well to such machines, but
it has been found to be more flexible when applied to toroidally wound IMs. In
Figure 5.39
p
x
is the pole number and
m
x
is the phase number.
5.4.3.1 Hunt winding
A unique winding for IMs was discovered by L.J. Hunt and published in 1914 that
described a self-cascaded IM in which windings of different pole numbers were
wound on the same stator. The schematic in Figure 5.40 has become known as the
Hunt winding. The rotor of the Hunt motor is wound with a pole number different
from either stator windings.
A typical Hunt wound, self-cascaded, IM may have two sets of stator windings,
one with
p
1
¼
4 poles and the second with
p
2
¼
8 poles. If the rotor is wound
having
p
3
¼
6 poles, the machine will function as a 12-pole IM. In this novel
machine, the
p
1
winding acts as the source of excitation and the second stator
winding behaves as if it were a rotor winding. The rotor
p
3
winding itself interprets
the stator
p
1
and
p
2
fields and develops a torque corresponding to
p
1
þ
p
2
. The
original Hunt winding was a very early attempt at IM speed control for low speed
applications from a fixed frequency supply. With resistance loading on the wound
rotor, it was possible to realize high starting torque and low speed operation.