Environmental Engineering Reference
In-Depth Information
has no rated point, rather a drive cycle dependent scatter of operating points so its
peak efficiency should extend from constant torque into constant power regions.
4.2.5 Constant power speed ratio (CPSR)
In Section 4.2.1, the discussion covered operation in constant power mode.
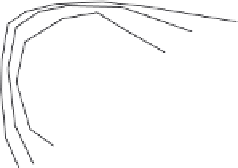
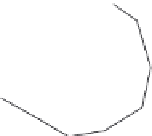
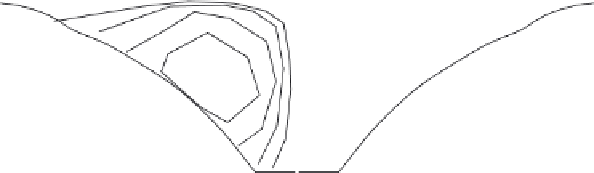
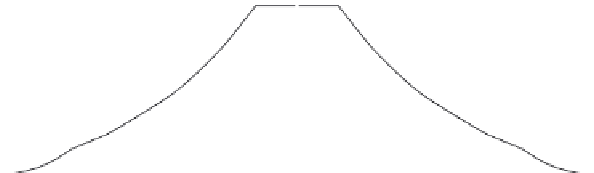
Figure 4.16 is given here to emphasize the point that ac drives employed as hybrid
propulsion components operate in both motoring (first and third) and generating
(second and fourth) quadrants. In mild hybrid, ISA applications, the M/G operates
in the first and fourth quadrants only because the engine is not to be back driven.
However, in power split and other hybrid propulsion architectures the M/G can and
does operate over all four quadrants as shown.
T (Nm)
300
6
5
4
3
2
1
0
1
2
3
4
5
6
Speed (krpm)
Speed (krpm)
Figure 4.16 M/G operating envelope for hybrid propulsion
Motoring operation of the M/G occurs for positive torque and positive (coun-
terclockwise [CCW]) speed or for negative torque and negative (clockwise [CW])
speed. When the sign of either torque or speed are reversed, the M/G is in gen-
erating mode. With modern power electronic controllers, the machine is capable of
operating anywhere within the confines of its torque-speed envelope shown in
Figure 4.16. For example, a transition from motoring at 2.5 krpm and 100 Nm of
torque to generating at 2.5 krpm and
100 Nm of torque is simply a sign change in
the power electronic controller. The speed and hence machine voltages remain
constant, or perhaps the voltage gets boosted somewhat by charging demands, but
the machine currents slew at their electrical time constant to resume operation as a
generator with phase currents in phase opposition to phase voltages (generally
sinusoidal variables). Since the machine transient electrical time constants are