Environmental Engineering Reference
In-Depth Information
State space averaged dc-dc converter model
I
d
U
c
U
d
I
c
Drive
profile
I
*
=
I
d
/(1
d
1
)
boost mode
or,
−
I
b
I
d_
ac
C
uc
(U)
I
*
VRLA
battery
I
L
I
*
=
I
d
/
d
2
buck mode
I
c_ fb
U
d
I
d
I
L
Duty cycle discriminator
and calculator
I
d_
ac
Current reg.
HPF G(s)
SOC
uc
calculator
d
1
*
d
*
Dynamic
set point
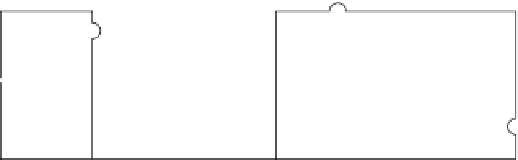
Figure 4.12 Simulation model of the state space averaged converter
●
The third line in (4.6) defines the regeneration duty cycle,
d
2
, or buck mode
operation.
●
The last line in (4.6) shows the symmetry between boosting duty cycle,
d
1
, and
regen duty,
d
2
.
●
Therefore, during boosting
I
c
= [1/(1
d
1
)]
I
d
but during regen
I
c
= (1/
d
2
)
I
d
.
At this point the full dynamic simulator can be designed for the active combi-
nation of ultra-capacitor and battery. For the BEV case being studied, the ultra-
capacitor is sized for 50 kW for 5 s, or 250 kJ of energy. The required capacitance in
this case would be a cell string rated 148 V and 22.8 F consisting of the series con-
nection of 58 cells rated 1,324 F. This is not a standard part so the next highest value is
selected, a 1,500 F, 2.7 V ultra-capacitor. The pack to be evaluated is therefore 25.9 F,
148 V and stores 78 Wh initially. This cell pack is modelled using the Maxwell
Technologies' non-linear reduced order equivalent circuit described in more detail in
Reference 13, with extensive related materials presented in References 7-22.
Figure 4.12 illustrates the full model architecturally without details of the ultra-
capacitor or lithium ion equivalent models. In both of these models the internal
non-linearity and SOC dependent potentials are combined with electrode dynamic
equivalent circuits and parasitic elements. The simulator also incorporates SOC
calculators for both energy storage components, SOC for the lithium ion and SOC
uc
for the ultra-capacitor. A duty cycle discriminator is necessary in order to have
seamless transitions between motoring (boost) and regeneration (buck) modes. The
drive cycle profile, in this case the
P
(
V
) file developed in Step 1 is imported into the
simulator. Then, the load source,
I
L
, is configured to transform the
P
(
V
) time series of
power into a load current that is dependent on the battery node potential,
U
b
.
When all the preliminaries are complete, the model is exercised and debugged
to ensure that the currents from the converter, battery and load comply with
Kirchhoff's current law at the output node and that the dc/dc converter is indeed
power invariant in operation (Figure 4.13).