Environmental Engineering Reference
In-Depth Information
Table 2.5 Camry Hybrid 2010 model specifications
Engine
2.4 L
110 kW Aerodynamic
C
d
0.27
~2.38 m
2
Tyres
P215/60R17
Frontal area
A
f
Dynamic rolling radius
r
w
0.355 m Battery voltage
U
b
244.8 V
Vehicle curb mass
M
v
1,673
MG1 power
P
MG1
105 kW
Tyre roll resistance
C
rr
0.008
Battery power
P
b
30 kW
0-60 mph time
t
z
60
8.9 s
MG2 power
P
MG2
75 kW
The vehicle is therefore capable of operating to
V
WOT
provided its engine and
electric traction motor can supply the needed propulsion power. See 'Exercises'.
2.3.2 Power split with shift
The basic architecture of power split can be augmented with a gear shift after the
torque summation point.
4
With a shift point in the ring gear to vehicle speed plots
there must be a fast speed transition in the sun and ring gear speeds if the engine
speed is held steady and there can be no discontinuities in vehicle speed. The
behaviour depicted in Figures 2.21 and 2.22 for the same component speeds,
w
s
,
w
c
and
w
r
, and vehicle speed,
V
, versus time shows tendency for the S/A speed to cross
zero or to hover near zero. Now suppose a single gear shift event is assumed to
occur sometime during the vehicle's acceleration (Figure 2.24). The consequent
speed transitions are shown as the sun and carrier speeds slew to new speeds to
maintain the power flow constant prior to and subsequent to the shift.
500
408.805791
w
r
(
i
)
10 V(
i
)
w
c
(
i
)
0
w
s
(
i
)
-410.018516
-500
0
2
4
6
8
10
10
t
(
i
)
Time (s)
0
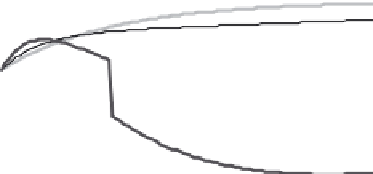
Figure 2.24 Power split dynamics during acceleration when a single gear shift is
assumed
4
Alternative architectural concept explored by J-N-J Miller Design Services, PLC.