Graphics Reference
In-Depth Information
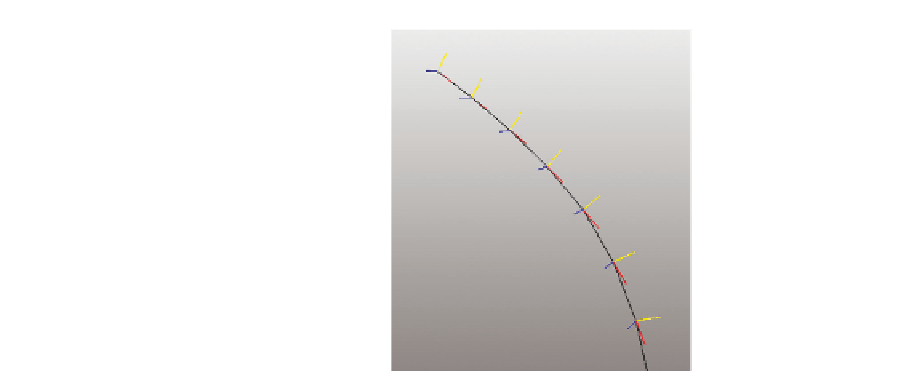
Figure 1.3.
Black is a hair stand. Red, yellow, and blue are
x
,
y
,and
z
axes, respectively.
1.4 Integration
To integrate the motion of hair dynamics, we use the Verlet integration scheme
because it is simple and shows good numerical stability compared to the explicit
Euler method. External forces such as gravity are applied during this step. The
damping coecient is multiplied by velocity to simulate a damping effect.
We integrate only particles whose inverse mass is nonzero. If the inverse mass
is zero, we consider it non-movable, update its positions following its attached
objects (such as a head), and skip the rest of the steps for those particles. We
assign zero inverse mass for vertex 0 and 1 so they can be animated following the
head movement.
1.5 Constraints
There are three types of constraints. ELC (edge length constraint) is a hard
constraint to simulate inextensible hair. LSC (local shape constraint) is a soft
constraint for bending and twisting. GSC (global shape constraint) is complemen-
tary to LSC and helps keep the initial hair shape preserved with very minimum
computation cost.
1.5.1 Edge Length Constraint
ELC enforces edges to keep their rest lengths. Figure 1.4 shows how position
corrections are computed for each edge. To be simple, we set an equal mass to
all vertices except the first two vertices. To apply this constraint in parallel,
we create two batches. Each batch is independent of the other so that it is