Hardware Reference
In-Depth Information
In a perfect world, you might know exactly how much control signal to apply to get a cer-
tain change in the roll/pitch/yaw or altitude of your quadcopter, as you know the compon-
ents you used to build your quadcopter. However, there are simply too many aspects of
your device that can vary to know this well enough to rely on a fixed set of signals. In-
stead, this platform uses a series of measurements of its position, pitch/roll/yaw, and alti-
tude and then adjusts the control signals to the motors to achieve the desired result. We
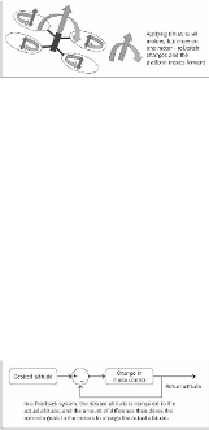
call this feedback control. The following is a diagram of a feedback system:
As you can see, if your quadcopter is too low, the difference between the desired altitude
and the actual altitude will be positive, and the motor control will increase the voltage to
the motors, thus increasing the altitude. If the quadcopter is too high, the difference
between the desired altitude and the actual altitude will be negative, and the motor control
will decrease the voltage to the motors, thus decreasing the altitude. If the desired altitude
and the actual altitude are equal, the difference between the two will be zero, and the mo-
tor control will be held at its current value. Thus, the system stabilizes even if the com-
ponents aren't perfect or if a wind comes along and blows the quadcopter up or down.
One application of Arduino in this type of robotic project is to actually coordinate the
measurement and control of the quadcopter's pitch/roll/yaw and altitude. To accomplish
this task, there are two approaches. First, configure Arduino and hook up the gyroscope,
altimeter, GPS, and magnetic direction-finding sensors, and code all of the control al-
gorithms yourself. The detail for all of this is beyond the scope of this topic, but there are
several excellent sites that support this. They can be found at
aeroquad.com/con-
intro-to-project-quadcopter.html
.
You can also visit
github.com/baselsw/BlueCopter
,
which provides a sketch that you could start with.