Geology Reference
In-Depth Information
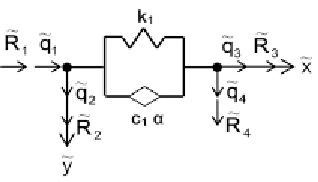
Figure 5. A schematic of the fractional derivative
Kelvin model
where the symbols
u t
d
( )
denote force
in the spring and the dashpot, respectively.
Proceeding as described above, the matrix
equation of the fractional-derivative Maxwell
model written in the global coordinate system is
obtained. The equation has the form of Equation
(18) where the vector
q
d
( )
and matrices
K
d
and
C
d
are as defined in Appendix A.
s
( )
and
u t
EQUATIONS OF MOTION FOR A
STRUCTURE WITH VE DAMPERS
Many particular rheological models existing in
the literature may be obtained by varying the
number of elements in the generalized models
mentioned above.
The fractional-derivative Kelvin model is
shown in Figure 5. Its equation of motion can be
written in the following form:
Equation of Motion for a Structure
with VE Dampers Modelled Using
Classical Rheological Models
Plane frame structures, treated as elastic systems
with VE dampers, are modelled using the finite
element method. A two-node bar element with six
nodal parameters is used to describe the structure.
The mass and stiffness matrices together with
the vector of nodal forces of the element can be
found in many sources. The equation of motion
of a structure with VE dampers modelled using
the generalized rheological models can be written
in the following form:
u t
( )
=
k q t
(
( )
−
q t
( ))
+
c D q t
α
(
( )
−
q t
( ))
(17)
1
3
1
1
t
3
1
α
where the symbol
D
t
(
•
denotes the Riemann-
Liouville fractional-derivative of the order
α
(
0
<
α
) with respect to time,
t
. Addi-
tional information concerning the Riemann-Li-
ouville fractional-derivative is given in the topic
by Podlubny (1999).
The matrix equation of the fractional-derivative
Kelvin model could be written, in the global co-
ordinate system, in the form:
1
M q
t
+
C q
t
+
C q
t
( )
( )
( )
ss
s
ss
s
sd
d
+
K q
t
+
K q
t
=
p
t
( )
( )
( )
(20)
ss
s
sd
d
s
C q
t
+
C q
t
+
K q
t
+
K q
t
=
(21)
0
( )
( )
( )
( )
α
R
t
=
K q
t
+
C
D
q
t
(18)
( )
( )
( )
ds
s
dd
d
ds
s
dd
d
d
d
d
d
t
d
where, again, the matrices
K
d
and
C
d
are given
in Appendix A.
The fractional-derivative Maxwell model of
a VE damper is shown in Figure 6. Its equations
of motion can be written in the following form:
T
where the symbols
M
ss
,
C
ss
,
C C
=
,
C
dd
,
sd
ds
=
and
K
dd
denote the global mass,
damping and stiffness matrices of the system (i.e.,
structure with dampers), respectively. The dimen-
sion of the matrices
M
ss
,
C C C
K
ss
,
K K
sd
ds
s
d
=
( )
+
( )
and
ss
ss
ss
s
d
K K K
ss
=
( )
+
( )
is (
n
×
). The matrices
u t
( )
=
k q t
(
( )
−
q t
( )),
ss
ss
s
1
w
1
( )
describe the inertia, damping
and elastic properties of the structure without
( )
and
K
ss
M
ss
,
C
ss
α
u t
( )
=
c D q t
(
( )
−
q t
( ))
(19)
d
1
t
3
w
Search WWH ::

Custom Search