Geology Reference
In-Depth Information
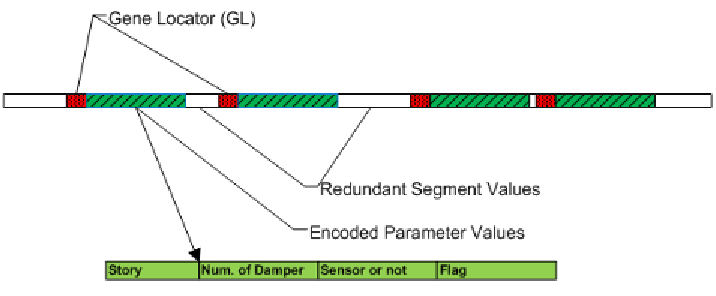
Figure 1. IRR GA representation (Cha et al. 2011a)
fuel, i.e., when the vehicle driver tries to operate
the vehicle with high speed, the consumption of
gas generally would increase. Therefore, there
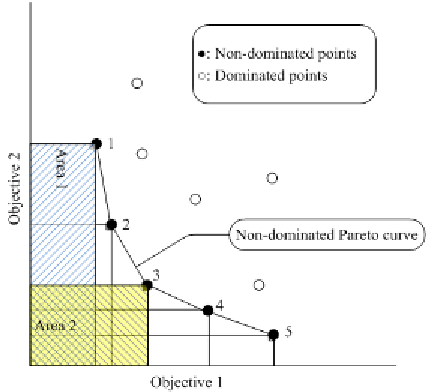
can be a lot of solutions satisfying each objective.
Each solution would not be covered by the other
solutions; this kind of solution set is called Pareto
tradeoff optimal curve as shown in Figure 2.
The concepts of sharing functions and crowding
operators to scatter the individuals to feasible
areas are discussed next.
Crowding Operator and Sharing Function
In general, evolutionary algorithms converge to a
single solution when limited population sets are
used even though the final goal is to find multiple
optima. This local convergence phenomenon is
called genetic drift (De Jong 1975). Thus, Holland
(1975) proposed the use of an environmental niche
Non-Dominated Pareto Ranking
To investigate multi-objective optimization prob-
lems, Goldberg (1989) applied a non-dominated
Pareto ranking and its selection method to achieve
a set of optimal solutions. To find the non-dom-
inated Pareto curve, the estimated value of each
individual objective function is compared with all
of the population individuals and then, the first
non-dominated front is determined. Without the
first non-dominated front set, the same selection
procedure is repeated until all the individuals in
the population are assigned in a front with a rank.
These individuals with the assigned ranks can be
used to select individuals as mating pools for the
next population. The first non-dominated set has
a higher probability to be chosen by the selec-
tion operator. However, from the non-dominated
Pareto ranking mechanism, the optimal solution
can be easily converged to local optima; thus, the
sharing function (Goldberg 1989) is adopted to
evenly scatter the individuals to feasible regions.
Figure 2. Non-dominated Pareto curve (Cha 2008)
Search WWH ::

Custom Search