Geology Reference
In-Depth Information
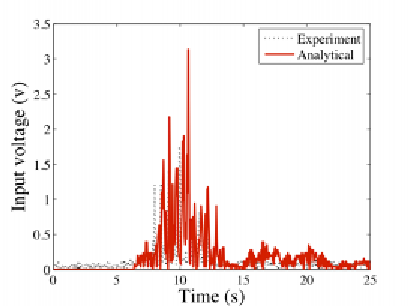
Figure 24. Voltage input to the MR damper using
optimal FLC (N. Palm Springs)
base isolation mechanism minimizes the drift
demand on the isolators. Therefore, the isolator
displacement is reduced when the MR damper is
attached. In this case MR damper absorbs a part
of the input seismic energy and dissipate it as heat
energy. But reducing isolator displacement in-
creases the super structure drift and acceleration,
as well as, the acceleration at the isolation level.
Therefore, addition of damping devices increases
the acceleration level as they decrease the isolator
displacement. This can be observed in Figure 9
through Figure 23. Therefore, too much or high
damping i.e., using full capacity of MR damper
will not allow the base to act as isolator and too
low damping i.e., using MR damper in zero volt-
age will not reduce the base displacement as re-
quired. A trade-off should be considered between
zero and maximum voltage supply to the damper.
This is achieved using GA optimized FLC
(GAFLC).
Another important motivation behind the
adoption of FLC based MR damper monitoring
is to provide smooth voltage (variable voltage)
update across the MR damper. Figure 24 shows
the voltage input to the MR damper under N. Palm
Springs seismic motion. The variable voltage input
to the MR damper is evident from the Figure 24.
developed in these algorithms. This drawback of
intelligent controllers limits their applications in
structural vibration control. On the other hand
properly designed model based controllers pro-
vide better stability but they are vulnerable to
parameter uncertainty.
In this section numerical study on two model
based stable controllers to monitor MR damper
input voltage using feedback from structural re-
sponses is reported. Nonlinear control algorithms
like dynamic inversion (Isidori, 1995, Ali and
Padhi, 2009) and integral backstepping (Krstic
et al., 1995; Krstic and Smyshlyaev, 2007) are
used to design semi-active control algorithms.
The dynamics of supplied and commanded current
input to MR damper is considered while designing
these nonlinear algorithms.
NONLINEAR CONTROL
STRATEGIES
As has been discussed earlier, MR damper input
voltage monitoring algorithms are developed in
the framework of intelligent based control schemes
and model based control schemes. Intelligent con-
trollers are efficient in controlling the structural
displacements responses with slight increase in
the structural acceleration response. This makes
the application of intelligent method based control
algorithm interesting.
Intelligent controllers need training for its
optimal performance and consequently are model
specific. Moreover, stability criteria are not well
Clipped Optimal Control
The clipped optimal control algorithm is proposed
by Dyke et al, (1996). It is currently the most
widely used algorithm for MR damper control.
This strategy consists of a bang-bang (on-off)
type of controller that causes the damper to gen-
erate a desirable control force which is determined
by an 'ideal' active controller (in state feedback
form). A force feedback loop is used to produce
Search WWH ::

Custom Search