Geology Reference
In-Depth Information
the set of
Y
= f(
X
)
, that are not strictly
dominated by another point in
Y
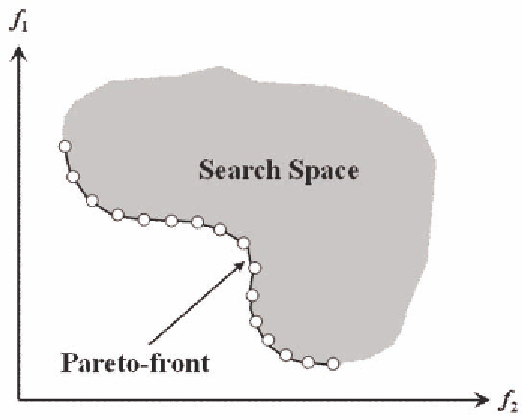
. The
Pareto-optimality is illustrated in Figure 2,
the plot is in the solution space, and the fig-
ure axes are two objective functions,
f
1
and
f
2
. Assuming that the objective is minimi-
zation of both
f
1
and
f
2
the Pareto-front lies
at the boundary that minimizes both objec-
tives as shown in the figure.
computationally efficient, the problems that could
be solved are limited due to fact that the objec-
tive functions, constraints and their sensitivities
should be expressed explicitly in terms of the
design variables. The latter condition imposes a
restraint on the analysis procedure that could be
selected for structural assessment. Furthermore,
the design variables should be continuous over
the search domain. In other words, discrete de-
sign variables such as the reinforcement ratio in
RC structures cannot directly be accounted for
in gradient-based optimization algorithms. As a
consequence, researchers used methods such as
the principle of virtual work in order to express
the objective function as well as the constraints
analytically (e.g. Chan & Zou, 2004).
With the immense increase in available com-
putational power in the recent years, researchers
started to incorporate more accurate analysis tools
in structural optimization such as the static push-
over and dynamic time history analysis through
finite element modeling. However, due to the fact
that these analysis techniques required algorithms
that do not entail the continuity of functions as
well as the existence of derivatives, researchers
Review of Most Commonly Used
Optimization Algorithms
The algorithms used in structural optimization
may be divided into two categories: gradient-
based and heuristic approaches. The earlier studies
on structural optimization utilized conventional
gradient-based algorithms to obtain the optimal
solution (e.g. Bertero & Zagajeski, 1979; Cheng
& Truman, 1985; Pezeshk, 1998). The most
commonly used algorithms include optimality
criteria, linear and nonlinear programming, fea-
sible directions, and state-space steepest descent.
Although the gradient-based approaches are
Figure 2. Illustration of Pareto-optimality
Search WWH ::

Custom Search