Graphics Reference
In-Depth Information
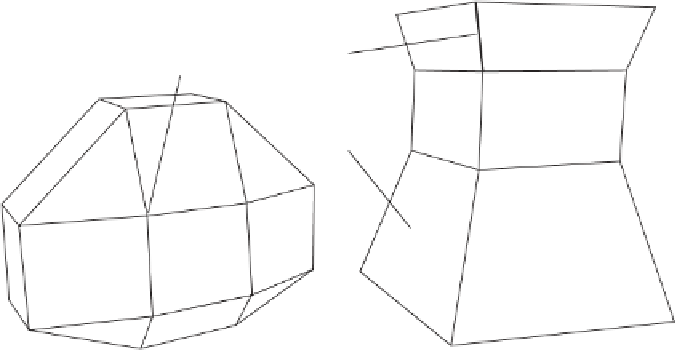
Edge
Vertex
Face
(a)
(b)
Figure 3.19
(a) A convex polyhedron. (b) A concave polyhedron. A face, an edge, and a
vertex have been indicated.
3.8
Polyhedra
A
polyhedron
is the 3D counterpart of a polygon. It is a bounded and connected region
of space in the shape of a multifaceted solid. The polyhedron boundary consists of
a number of (flat) polygonal faces connected so that each polygon edge is part of
exactly two faces (Figure 3.19). Some other definitions of a polyhedron allow it to be
unbounded; that is, extending indefinitely in some directions.
As for polygons, the polyhedron boundary divides space into two disjoint regions:
the
interior
and the
exterior
. A polyhedron is convex if the point set determined by its
interior and boundary is convex. A (bounded) convex polyhedron is also referred to
as a
polytope
. Like polygons, polytopes can also be described as the intersection of a
finite number of halfspaces.
Ad
-simplex
is the convex hull of
d
1 affinely independent points in
d
-dimensional
space. A
simplex
(plural
simplices
)isa
d
-simplex for some given
d
. For example, the
0-simplex is a point, the 1-simplex is a line segment, the 2-simplex is a triangle, and
the 3-simplex is a tetrahedron (Figure 3.20). A simplex has the property that removing
a point from its defining set reduces the dimensionality of the simplex by one.
For a general convex set
C
(thus, not necessarily a polytope), a point from the
set most distant along a given direction is called a
supporting point
of
C
. More
specifically,
P
is a supporting point of
C
if for a given direction
d
it holds that
d
+
max
d
C
; that is,
P
is a point for which
d
P
is maximal. Figure 3.21
illustrates the supporting points for two different convex sets. Supporting points are
sometimes called
extreme points
. They are not necessarily unique. For a polytope, one
of its vertices can always be selected as a supporting point for a given direction.
·
P
=
·
V
:
V
∈
·