Graphics Reference
In-Depth Information
But notice that the top-row elements of the transform are the direction cosines of the rotated
X
-axis, and the bottom-row elements are the direction cosines of the rotated Y
-axis. Thus, we
can state that the coordinates of a point P x
P
y
P
in a rotated frame of reference are given by
x
P
y
P
r
11
x
P
y
P
r
12
=
·
r
21
r
22
where
r
11
is the direction cosine of X
relative to X
r
12
is the direction cosine of X
relative to Y
r
21
is the direction cosine of Y
relative to X
r
22
is the direction cosine of Y
relative to Y
Note that because sin
2
+
cos
2
=
1, the direction cosines for any vector possess the following
qualities:
r
11
+
r
12
=
1
r
21
+
r
22
=
1
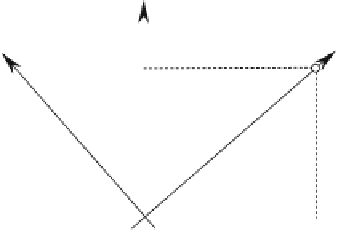
To demonstrate this transform in action, consider the case of calculating the new coordinates
of P 11, where the axes are rotated 45
. This scenario is shown in Fig. 2.44.
Y
P
1
X
′
Y
′
45
°
1
X
Figure 2.44.
It s
h
ould be obvious from Fig. 2.44 that the coordinates of P relative to the rotated axes are
√
20
, and the transform will confirm this result.
The direction cosines for X
are cos 45
and sin 45
, while the direction cosines for Y
are
sin 45
and cos 45
, which produces the following transform:
x
P
y
P
−
0707
x
P
y
P
0707
=
·
−
0707
0707
x
P
y
P
=
1414 0