Graphics Reference
In-Depth Information
7 Rotating Vectors
7.1 Introduction
In this chapter we develop a transform to rotate a position vector about an arbitrary axis and then
we examine how quaternions perform a similar function, but using a totally different approach.
Points in R
3
are readily rotated about one or more Cartesian axes using Euler transforms,
which are, unfortunately, prone to gimbal lock, where a degree of rotational freedom is lost
under certain circumstances. However, in the 19th century, quaternions were discovered, which
can rotate vectors in R
3
without gimbal lock. But before examining quaternions, let's develop a
transform to rotate a vector about an arbitrary axis.
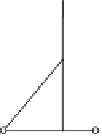
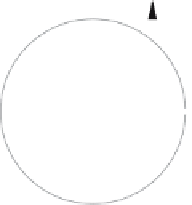
7.2 Rotating a vector about an arbitrary axis
This analysis assumes a position vector
p
with its associated point P, which is to be rotated about
an axis
n
that intersects the origin. Such a scheme is shown in Fig. 7.1, where Fig. 7.1(a) shows the
overall scenario, Fig. 7.1(b) illustrates a side elevation, and Fig. 7.1(c) illustrates a plan elevation.
ˆ
n
w
n
P
′
P
′
r
P
N
α
N
r
r
Q
P
α
N
P
r
Q
p
′
n
n
p
p
θ
θ
O
O
(a)
(b)
(c)
Figure 7.1.
179