Information Technology Reference
In-Depth Information
Error
that weight (
local
), or the changes depend on more re-
mote signals (
nonlocal
). Although both Hebbian and
GeneRec error-driven learning can be
computed
locally
as a function of activation signals, error-driven learning
really depends on nonlocal error signals to drive weight
changes, while Hebbian learning has no such remote
dependence.
We can understand the superior task-learning perfor-
mance of error-driven learning in terms of this locality
difference. It is precisely because error-driven learning
has this remote dependence on error signals elsewhere
in the network that it is successful at learning tasks,
because weights throughout the network (even in very
early layers as pictured in figure 6.1) can be adjusted to
solve a task that is only manifest in terms of error sig-
nals over a possibly quite distant output layer. Thus, all
of the weights in the network can work together toward
the common goal of solving the task. In contrast, Heb-
bian learning is so local as to be myopic and incapable
of adjusting weights to serve the greater good of correct
task performance — all Hebbian learning cares about is
the local correlational structure over the inputs to a unit.
The locality of Hebbian learning mechanisms has its
own advantages, however. In many situations, Heb-
bian learning can directly and immediately begin to de-
velop useful representations by representing the prin-
cipal correlational structure, without being dependent
on possibly remote error signals that have to filter their
way back through many layers of representations. With
error-driven learning, the problem with all the weights
trying to work together is that they often have a hard
time sorting out who is going to do what, so that there
is too much
interdependency
. This interdependency can
result in very slow learning as these interdependencies
work themselves out, especially in networks with many
hidden layers (e.g., figure 6.1). Also, error-driven units
tend to be somewhat “lazy” and just do whatever little
bit that it takes to solve a problem, and nothing more.
A potentially useful metaphor for the contrast be-
tween error-driven and Hebbian learning comes from
traditional left-wing versus right-wing approaches to
governance. Error-driven learning is like left-wing pol-
itics (e.g., socialism) in that it seeks cooperative, or-
ganized solutions to overall problems, but it can get
bogged down with bureaucracy in trying to ensure that
...
...
...
...
Hebbian
is local
error−driven
is based on
remote errors
...
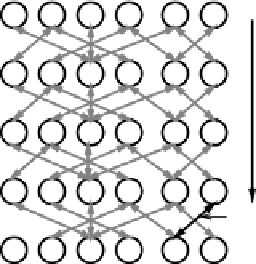
Figure 6.1:
Illustration of the different fates of weights
within a deep (many-layered) network under Hebbian versus
error-driven learning. Hebbian learning is completely local
— it is only a function of local activation correlations. In con-
trast, error-driven learning is ultimately a function of possibly
remote error signals on other layers. This difference explains
many of their relative advantages and disadvantages, as ex-
plained in the text and table 6.1.
Pro
Con
Hebbian
autonomous,
myopic,
(local)
reliable
greedy
Error-driven
task-driven,
co-dependent,
(remote)
cooperative
lazy
Tab le 6 . 1 :
Summary of the pros and cons of Hebbian and
error-driven learning, which can be attributed to the fact that
Hebbian learning operates locally, whereas error-driven learn-
ing depends on remote error signals.
(2) How might these two forms of learning be used in
the cortex? Then, we explore the combined use of Heb-
bian and error-driven learning in two simulations that
highlight the advantages of their combination.
6.2.1
Pros and Cons of Hebbian and Error-Driven
Learning
One can understand a number of the relative advantages
and disadvantages of Hebbian and error-driven learning
in terms of a single underlying property (figure 6.1 and
table 6.1). This property is the
locality
of the learning
algorithms — whether the changes to a given weight
depend only on the immediate activations surrounding





Search WWH ::

Custom Search