Information Technology Reference
In-Depth Information
output layer in this case, but it could be another hidden
layer):
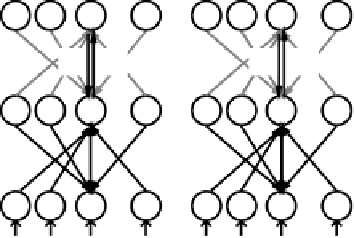
a) Minus Phase
b) Plus Phase
External Target
(actual output)
(5.31)
o
k
t
k
. . .
. . .
w
kj
w
jk
w
kj
w
jk
5.6.3
The Biological Implausibility of
Backpropagation
h
j
−
h
+
. . .
. . .
w
ij
w
ij
Unfortunately, despite the apparent simplicity and el-
egance of the backpropagation learning rule, it seems
quite implausible that something like equations 5.21
and 5.24 are computed in the cortex. Perhaps the
biggest problem is equation 5.24, which would require
in biological terms that the
Æ
value be propagated
back-
ward
from the dendrite of the receiving neuron, across
the synapse, into the axon terminal of the sending neu-
ron, down the axon of this neuron, and then integrated
and multiplied by both the strength of that synapse and
some kind of derivative, and then propagated back out
its dendrites, and so on. As if this were not problematic
enough, nobody has ever recorded anything that resem-
bles
Æ
in terms of the electrical or chemical properties
of the neuron.
As we noted in the introduction, many modelers have
chosen to ignore the biological implausibility of back-
propagation, simply because it is so essential for achiev-
ing task learning, as suggested by our explorations of
the difference between Hebbian and delta rule learn-
ing. What we will see in the next section is that we
can rewrite the backpropagation equations so that er-
ror propagation between neurons takes place using stan-
dard activation signals. This approach takes advantage
of the notion of activation phases that we introduced
previously, so that it also ties into the psychological in-
terpretation of the teaching signal as an actual state of
experience that reflects something like an outcome or
corrected response. The result is a very powerful task-
based learning mechanism that need not ignore issues
of biological plausibility.
s
i
s
i
. . .
. . .
External Input
External Input
Figure 5.9:
Illustration of the GeneRec algorithm, with bidi-
rectional symmetric connectivity as shown.
a)
In the minus
phase, external input is provided to the input units, and the
network settles, with some record of the resulting minus phase
activation states kept.
b)
In the plus phase, external input (tar-
get) is also applied to the output units in addition to the input
units, and the network again settles.
backpropagation to be implemented in a more biologi-
cally plausible manner. The recirculation algorithm was
subsequently generalized from the somewhat restricted
case it could handle, resulting in the
generalized re-
circulation
algorithm or
GeneRec
(O'Reilly, 1996a),
which serves as our task-based learning algorithm in the
rest of the text.
GeneRec adopts the activation
phases
introduced
previously in our implementation of the delta rule. In
the
minus phase
, the outputs of the network represent
the
expectation
or
response
of the network, as a function
of the standard activation settling process in response to
a given input pattern. Then, in the
plus phase
,theen-
vironment is responsible for providing the
outcome
or
target
output activations (figure 5.9). As before, we use
the
+
superscript to indicate plus-phase variables, and
to indicate minus-phase variables in the equations be-
low.
It is important to emphasize that the full bidirectional
propagation of information (bottom-up and top-down)
occurs during the settling in each of these phases, with
the only difference being whether the output units are
updated from the network (in the minus phase) or are
set to the external outcome/target values (in the plus
5.7
The Generalized Recirculation Algorithm
An algorithm called
recirculation
(Hinton & McClel-
land, 1988) provided two important ideas that enabled


Search WWH ::

Custom Search