Information Technology Reference
In-Depth Information
be released and the maximal density and alignment of
postsynaptic receptors. What the soft weight bounding
mechanism does is to assume that these natural bounds
are approached exponentially slowly — such exponen-
tial curves are often found in natural systems. However,
we do not know of any specific empirical evidence re-
garding the nature of the synaptic bounding function.
a) Minus Phase
(expectation)
b) Plus Phase
(outcome)
target
output
5.4.3
Activation Phases in Learning
Finally, we need to address the third problem concern-
ing the plausibility and nature of the target signal. Per-
haps the simplest interpretation would be to think of the
target as just another activation state, but one that cor-
responds to the experience of either an explicit instruc-
tional signal from some external source, or an actual
observed
outcome
of some event in the world. In this
context, the activation state
o
k
produced by the network
can be thought of as either an overt response, or an in-
ternal
expectation
or prediction of an outcome. Thus,
two activation states may follow from a given input, an
expectation followed by an actual outcome, or an overt
response followed by feedback to that response. We
will discuss these and other scenarios in more detail in
section 5.8 once we have developed a more complete
picture of the biological mechanisms that could imple-
ment error driven learning.
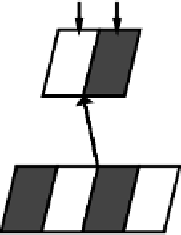
Figure 5.6 shows how the expectation and outcome
activation states can be implemented as two different
phases
of activation. For reasons that will become clear,
we call the expectation-like phase the
minus phase
,and
the outcome-like target phase the
plus phase
.Inthis
phase-based framework, delta rule learning involves
taking the difference between the plus and minus phases
of the output activation states. One way of thinking
about the names of these phases is that the minus phase
is
subtracted
from the plus phase. We can translate the
equation for the delta rule to refer to the different phases
of the output activation, using the plus and minus super-
scripts to denote phase:
Input
Input
Figure 5.6:
Phases of activation (minus and plus) in error-
driven learning. In the minus phase, the input activates the
output pattern according to the weights, producing something
like an expectation or response. In the plus phase, the ac-
tual outcome or correct response (target) is clamped onto the
output units. In this example, the expectation was incorrect,
as you can tell from the difference in output layer activation
state between the two phases.
For this phase-based learning to work, some record of
both phases of activation must be available at the time of
learning. These two states likely occur in rapid succes-
sion, going from expectation to subsequent outcome, so
that the necessary record is plausible. We will explore
specific biological mechanisms later, and proceed now
to explore the properties of the delta rule in the next
section.
5.5
Exploration of Delta Rule Task Learning
Open the project
pat_assoc.proj.gz
in
chapter_5
to begin. (Or, if you already have
this project open from the previous exercise, re-
set the parameters to their default values using the
Defaults
button.)
View
the
TRAIN_GRAPH_LOG
and
the
TEST_GRID_LOG
. Then, select
DELTA
instead of
HEBB
for the
learn_rule
in the
pat_assoc_ctrl
control panel, and
Apply
.
This will switch weight updating from the default
CPCA Hebbian rule explored previously to the delta
rule.
,
!
(5.20)
In the simulator, these phase variables are stored as
act_m
(minus phase) and
act_p
(plus phase).
The effects of this switch can be seen in the


Search WWH ::

Custom Search