Information Technology Reference
In-Depth Information
Weight Changes
alizing function. Thus, the units themselves evolve their
own conditionalizing function as a result of a complex
interaction between their own learning experience, and
competition with other units in the network. In the next
chapter, we will see that error-driven task learning can
provide a conditionalizing function based on the pat-
terns of activation necessary to solve tasks. In chapter 6,
we explore the combination of both types of condition-
alizing functions.
Before we proceed to explore these conditionalizing
functions, we need to develop a learning rule based
specifically on the principles of CPCA. To develop this
rule, we initially assume the existence of a condition-
alizing function that turns the units on when the input
contains things they should be representing, and turns
them off when it doesn't. This assumption enables us
to determine that the learning rule will do the appropri-
ate things to the weights given a known conditionalizing
function. Then we can go on to explore self-organizing
learning.
By developing this CPCA learning rule, we develop a
slightly different way of framing the
objective
of Heb-
bian learning that is better suited to the idea that the
relevant environmental structure is only conditionally
present in subsets of input patterns, and not uncondi-
tionally present in every input pattern. We will see that
this framing also avoids the problematic assumption of
a linear activation function in previous versions of PCA.
The CPCA rule is more consistent with the notion of in-
dividual units as hypothesis detectors whose activation
states can be understood as reflecting the underlying
probability of something existing in the environment (or
not).
input 1
input 2
input 3
input 4
...
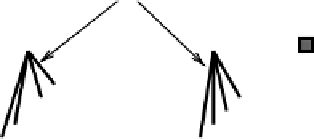
Figure 4.10:
Conditionalizing the PCA computation — the
receiving unit only learns about those inputs that it happens
to be active for, effectively restricting the PCA computation
to a subset of the inputs (typically those that share a relevant
feature, here rightward-leaning diagonal lines).
length, or the like were present, then you would end
up with units that encode information in essentially the
same way the brain does, because the units would then
represent the correlations among the pixels in this par-
ticular subset of images. One way of expressing this
idea is that units should represent the
conditional
prin-
cipal components, where the conditionality restricts the
PCA computation to only a subset of input cases (fig-
ure 4.10).
In the remainder of this section, we develop a ver-
sion of Hebbian learning that is specifically designed for
the purpose of performing
conditional PCA
(
CPCA
)
learning. As you will see, the resulting form of the
learning rule for updating the weights is quite similar to
Oja's normalized PCA learning rule presented above.
Thus, as we emphasized above, the critical difference
is not so much in the learning rule itself but rather in
the accompanying activation dynamics that determine
when individual units will participate in learning about
different aspects of the environment.
The heart of CPCA is in specifying the conditions un-
der which a given unit should perform its PCA compu-
tation — in other words, the
conditionalizing function
.
Mechanistically, this conditionalizing function amounts
to whatever forces determine when a receiving unit is
active, because this is when PCA learning occurs. We
adopt two main approaches toward the conditionalizing
function. Later in this chapter we will use inhibitory
competition together with the tuning properties of Heb-
bian learning to implement a
self-organizing
condition-
4.5.1
The CPCA Learning Rule
The CPCA learning rule takes the conditionalizing idea
literally. It assumes that we want the weights for a given
input unit to represent the conditional probability that
the input unit (
x
i
) was active given that the receiving
unit (
y
j
) was also active. We can write this as:
(4.11)






















Search WWH ::

Custom Search