Biomedical Engineering Reference
In-Depth Information
MSR
Physiological activity
Technical sources
[min
-1
]
Coughing, laughing
Aircrafts
Running
Machines
Stairs climbing
Car
Power tools
Housework
LRL
0
max
Time
Talking
Walking
Bass
Fig. 8.7
Reaction time parameter
100
10
1
frequency [log Hz]
coordinate system, which is why the position of the implanted
device has no impact on its operation.
The response of the device to the signal generated by the
accelerometer sensor is determined by several programma-
ble parameters that are named differently by different manu-
facturers; however, the principle is similar [ 32, 62, 63 ] . The
basic parameter represents what is referred to as the activity
threshold - an activity level that must be exceeded before the
pacing starts to be driven by the sensor. The setting of the
threshold must allow pacing during a minor activity, such as
walking, to be increased but must also be high enough to
prevent an inappropriate pacing increase in response to low-
intensity movements (e.g., respiration, heartbeat, or
Parkinson's disease-related tremor).
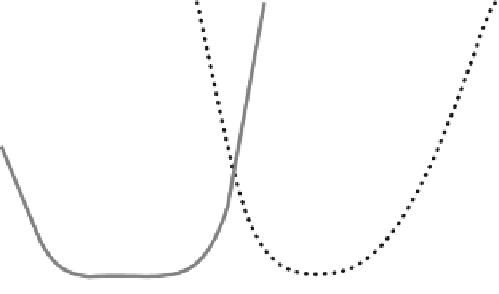
The response time is another parameter; it sets the time
required to accelerate the pacing to the new level if an increase
in activity level is detected (Fig.
8.7
). The selected response
time determines the time over which the pacing will increase
from the LRL to MSR at the maximum activity level. A lower
value of the response time will cause fast acceleration of
pacing; a larger value will cause slower acceleration of pac-
ing, or else, according to system manufacturer.
The response factor parameter is defined as the change of
intervals between pacing pulses caused by the change of the
accelerometer signal (Fig.
8.8
). The relation between the
accelerometer signal and this interval is linear. The acceler-
ometer signal is zero at rest. The pacing is then provided at
the LRL. Under maximum load, the accelerometer signal has
the highest amplitude, and the pacemaker should pace at the
programmed MSR. Setting the response factor to a higher
value will enable the rate to reach the MSR at a lower level
of activity. At a lower value, more activity is needed to reach
the MSR, or else, according to system manufacturer.
The recovery time parameter determines the time required
for the pacing to decelerate from the MSR to the LRL in the
absence of activity (Fig.
8.9
). A lower value of deceleration
will cause a faster or slower decrease in the pacing rate after
the decrease or cessation of the patient's activity, or else,
according to system manufacturer.
Fig. 8.6
Frequency range associated with physiological activity and
technical sources
to the parameter of a maximum tracking rate and refractory
periods. Adaptive-rate pacing can be unsuitable for patients
suffering from angina pectoris or other symptoms of cardiac
ischemia at higher pacing rates. The appropriate MSR value
should be selected based on the estimation of the maximum
pacing rate a patient tolerates well. A long programmed
refractory period, together with a high MSR, may result in
asynchronous pacing during refractory periods - the combi-
nation may lead to a small sensing window or none at all [20,
32, 63]. Because of a proven potentially proarrhythmic effect
of adaptive-rate pacing, it must be programmed with caution,
and the effect of higher pacing rates on the patient must be
evaluated before the patient leaves the medical center.
8.4.1
Accelerometer
The accelerometer sensor detects body motion associated
with a patient's physical activity. The sensor generates an
electronic signal proportional to the magnitude of motion.
Based on the accelerometer output signal, the pacemaker
estimates the increased needs of the patient relating to the
exercise and translates the signal into a pacing rate increase.
The accelerometer is often placed in a hybrid integrated cir-
cuit and reacts to the activity in the frequency range typical
of motion activity, that is, approximately 1-10 Hz (Fig.
8.6
).
The sensor evaluates the signal frequency and amplitude.
The frequency reflects the motion frequency; the amplitude
reflects the intensity of the motion. The algorithm translates
measured acceleration into a rate increase over the LRL
value. Because the accelerometer is not in contact with the
pacemaker can, the response to static pressure applied to the
pacemaker is negligible. In terms of design, the accelerome-
ter sensor is a piezoelectric crystal. It senses various kinds of
activities using the ratio of load in three dimensions of a