Biomedical Engineering Reference
In-Depth Information
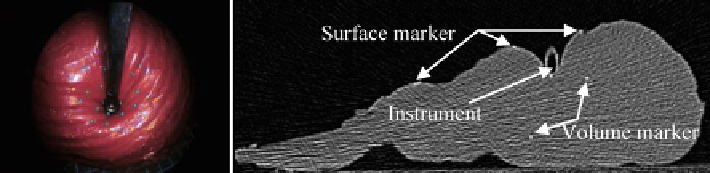
Fig. 3 Marker balls on the phantom's surface track instrument induced surface deformations (
left
)
and a CT slice of the deformed phantom (
right
)
4.3 Phantom Experiment
As an example of how the model can be used to recover intraoperative soft tissue
motion, we performed an instrument indentation on a mechanically accurate silicon
liver phantom. In order to track the deformation, radio-opaque marker balls were
attached to the phantom's surface (Fig.
3
). The positions of these surface markers in
the deformed configuration were then propagated to a FE model of the phantom.
During laparoscopic surgery, the information about surface displacement can for
example be obtained through feature tracking in endoscopic images as
demonstrated by Pratt et al. The biomechanical model is then used to recover the
volumetric displacement inside the organ. We evaluated the accuracy of the method
by manually tracking volume marker balls inside the phantom around the
instrument's tip. With a maximum displacement of 22.24 mm at the instrument's
tip, the mean displacement error of these marker balls was 5.53 mm.
This error can be primarily attributed to the low resolution of the model (5,652
elements, 10,039 nodes). At this resolution the FEmesh cannot adequately capture the
strong local deformations. Furthermore, the displacement boundary conditions can
only be described at the nodes of the FE mesh. Consequently, each surface marker
position has to be propagated to the nearest node, which can introduce a significant
error. The phantom experiment thus highlights the fact that high-resolution FEmeshes
have to be used for intraoperative registration.
5 Conclusions
Image-constrained biomechanical models can be used to compensate soft tissue
deformations using sparse intraoperative sensor data (e.g., from endoscopes or 2D-
ultrasound). Due to the fact that only displacement boundary conditions are
imposed on the model, the biomechanical models used for this purpose do not
need to accurately model the material nonlinearity and viscoelastic behavior of soft
tissue. However, a high resolution FE mesh has to be solved in real-time for