Biomedical Engineering Reference
In-Depth Information
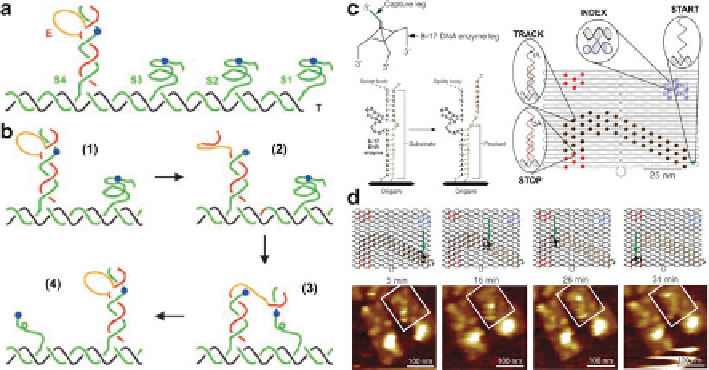
Fig. 2.10
(
a
) The construction of walking DNAzyme consisting of template (T), substrate (S),
and the DNAzyme walker (Reproduced from Ref. [
89
] by permission of John Wiley & Sons Ltd.).
(
b
) The working principle of DNAzyme walker with simplified two substrates (Reproduced from
Ref. [
89
] by permission of John Wiley & Sons Ltd.). (
c
)The composition of molecular spiders with
8-17 DNAzyme and the fabricated 2D DNA origami structure with INDEX, START, TRACK, and
STOP sites (Reprinted by permission from Macmillan Publishers Ltd.: Ref. [
90
], copyright 2010).
(
d
) AFM imaging at different times after releasing of the spiders. Images from
left
to
right
are
separately 5, 16, 26, and 31 min (Reprinted by permission from Macmillan Publishers Ltd.: Ref.
[
90
], copyright 2010)
single-stranded DNA template and four DNA-RNA chimera substrates (Fig.
2.10
a).
The substrates can be recognized by the DNAzyme and are stations for the walker.
The tails of four substrate stations are the same but with different tags to distinguish
the different locations. The walker is a 10-23 DNAzyme. As shown in Fig.
2.10
b,
once bound to a substrate, the walker cleaves the substrate and releases a short
fragment of the substrate. Therefore, the walker leaves the cleaved station due to the
lack of hybridized force. The DNAzyme will have a chance to pair with the adjacent
substrate station by strand displacement. Finally, the entire DNAzyme dissociates
from the cleaved substrate and moves to the new one. This DNA walking system is
a biomimetic nanomotor that works autonomously and processively.
Moreover, higher-dimension (2D) arrays were further designed to guide the
DNA walkers for controlled motion with 2D trajectories by Yan's group [
90
].
In Fig.
2.10
c, on a two-dimensional DNA origami landscape, molecular spiders
comprised of a streptavidin as an inert “body” and three 8-17 DNA enzymes
as catalytic “legs” move in an anticipated trajectory by recognition and catalytic
reaction along the tracks of substrate molecules. The legs will bind and cleave
substrates at single ribose sites into two shorter strands that will not bind tightly
enough. As a result, legs move to an accessible neighboring site. Due to multiple
legs with higher affinity, the body of spiders will be positioned at the interface. The
spiders will move along the substrate track since unreacted substrates have higher
Search WWH ::

Custom Search