Biomedical Engineering Reference
In-Depth Information
10
6
Human-based motion
Machine-based vibration
10
4
10
2
10
0
ASTF=10
ASTF=1
ASTF=0.1
ASTF=0.01
ASTF=0.001
10
-2
10
-4
10
-1
10
0
10
1
10
2
10
3
Q
factor
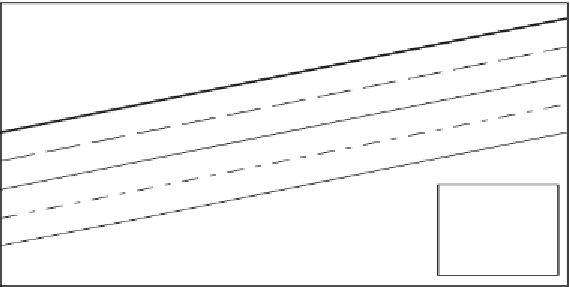
Figure 2.3 Maximum power available for linear-vibration generators at resonance from human-based motion and
machine-based vibration.
Q
B
100 and
σ
ω
B
0.01). The
σ
ω
values from
Table 2.2
served as
reference.
Figure 2.3
indicates the maximum power that can be delivered into
an electric load for a system vibrating at its resonant frequency. If the
energy from body motion can be harnessed by operating at resonance,
then power densities comparable to generators from machine vibra-
tions can be reached. From
Figure 2.3
, it seems reasonable to generate
power from body motion with power densities on the order of milli-
watt per cubic centimeter. Therefore, human-based generators are still
an untapped source of kinetic energy.
However, Figure 2.3 only gives an estimate of where the overall
maximum power density lies. The values must vary depending on body
location and type of activity performed. A study performed by
Romero et al. (2010) evaluated several body locations (ankle, knee,
hip, chest, wrist, elbow, upper arm, and side of the head) while walk-
ing and running on a treadmill. This evaluation provided an approxi-
mation of the maximum available power. The test was performed on
10 individuals (5 women, 5 men) with accelerometers strapped at those
locations and a portable data logger. Treadmill walking speed varied
from 1.0 to 4.0 mph (0.45
1.79 m/s) while running speeds ranged
2.24 m/s). Three-axis accelerometers (
6
3
G
2
from 2.0 to 5.0 mph (0.89
2
1
G
5
9.8 m/s
2
.