Biomedical Engineering Reference
In-Depth Information
For a suciently smooth, fast{decaying function f in IR
n
we dene the
Radon transform as the integral over L(;s)
Z
Rf(;s) =
f(x) dx
L(;s)
and its companion, the X{ray transform, as the line integral over the line in
direction passing through x
Z
f(x + t) dt; x 2 IR
n
; x 2
?
:
Pf(;x) =
IR
Note that for n = 2, we have Rf(;s) = Pf(
?
;s), so both are equivalent.
For n = 2, both Radon and X{ray transforms are the mathematical realization
of the physical PET measurement process, for n = 3, X{ray transform gives
the correct model.
We define the backprojection operator R
as
Z
(R
g)(x) =
g(;x) d
S
n
1
or (R
g)(x) the integral of g over all hyperplanes passing through x. Back-
projection is the simplest approach for doing inversion on measured data: in
order to recover the activity in a point x, simply average all measurements
over lines through x. We will analyze this approach later; a simple example is
in Figure 3.1.
Backprojection for P is defined accordingly for line integrals
Z
(P
h)(x) =
h(;x
0
)d
S
n
1
where x
0
is the projection of x onto
?
.
1.4
1.2
1
x
0.8
0.6
0.4
0.2
0
0
20
40
60
80
100
120
140
(a)
(b)
(c)
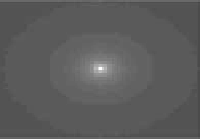
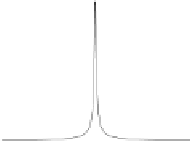
FIGURE 3.1: Unfiltered backprojection. (a) Integrate over all line integrals
through x. (b) Simple unfiltered backprojection of a point source. (c) Point
source backprojection cross section.












































Search WWH ::

Custom Search