Robotics Reference
In-Depth Information
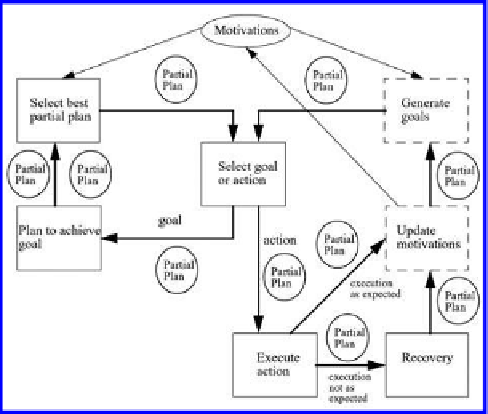
Figure 44.
Ruth Aylett's overall planning architecture (Courtesy of Ruth Aylett)
the best goal the robot assesses the importance of each goal, estimates
the effort required to execute each, and determines whether there is an
urgent deadline for one or more of its current goals. A decision will be
taken to execute an action rather than to satisfy a goal if there is an action
at the top of a partial plan, an action for which all of its preconditions are
currently true and one whose immediate execution is appropriate at the
current time. The priority value for an action is calculated in the same
way as for a goal, namely taking into account its importance, the effort
required to carry it out and whether it has an urgent deadline.
If a goal has been selected, rather than an action, the planning process
starts up and a new partial plan is added to the list of partial plans await-
ing execution, unless the goal of this new partial plan cannot possibly
be achieved. When the new partial plan has been created, the system
estimates deadlines for all of its actions, based on its knowledge of how
long each action will take to execute. When all of these time estimates are
known, the system checks to see whether there is sufficient time in which
to meet all of its goals, failing which the user is offered the opportunity
of editing the plan manually in order to change the time constraints im-
posed on satisfying the main goal, and if the user rejects this option the
current plan is rejected and the goal it was hoping to achieve is removed
from the list of active goals. If on the other hand there
is
sufficient time
for the plan to meet the main goal, the goal it now knows can be achieved