Robotics Reference
In-Depth Information
5
2
1
6
10
9
8
7
15
16
40
17
14
13
39
21
19
25
18
23
24
22
38
20
29
28
26
27
30
31
32
12
36
11
33
35
34
37
4
3
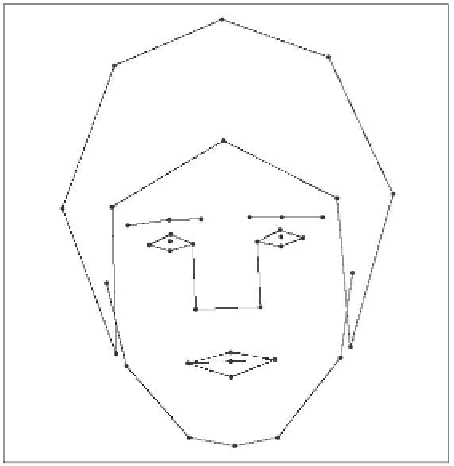
Figure 33.
A wire frame model based on 40 features of a face (
Figure 1
of “Finding
Face Features” by Ian Craw, David Tock, and Alan Bennett,
Second European Conference
on Computer Vision
, Lecture Notes in Computer Science 588, Springer-Verlag, Berlin,
1992, 92-96) (Courtesy of Ian Craw, David Tock and Alan Bennett)
case of a system developed at the University of Aberdeen,
6
40 feature
When such a system is attached to a video surveillance system, the
recognition software searches for faces using a low-resolution image
7
of
the scene, then it switches to a high-resolution search when a head-like
shape has been spotted. If there is a face in view it is detected within a
fraction of a second. Once a face has been detected, the system deter-
mines the position, size and pose of the head. The image of the head
is then scaled up or down in size and rotated, so that it can be regis-
tered in the system's memory in the same size and pose employed for the
faces in the system's database. The system translates the facial data from
every image into an almost-unique numerical code, which allows for an
easy comparison of the face currently under examination with the faces
in the database. Finally, the matching process identifies those stored im-
ages of faces that most closely match the face under examination. The
6
This system was developed during the 1990s by Ian Craw and his team.
7
An image with a relatively small number of pixels.