Robotics Reference
In-Depth Information
R1
R3
R2
R7
R5
R4
R6
R1
R6
R4
R2
R3
R5
R7
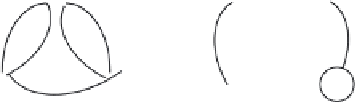
Figure 32.
An arch, segmented into its component parts, with links shown between its
various regions (after page 136 of
Artificial Intelligence: An Introductory Course
edited by
Alan Bundy, Edinburgh University Press, Edinburgh, 1978) (Reprinted with permission
by Adolfo Guzman-Arenas)
figure. Whenever a link joins two regions, this suggests that the regions
are part of the same object, and the type of link suggests what types of
object the program should consider.
The recognition problem in the real world is very much more com-
plex and difficult to solve than is the case for objects represented as black-
and-white line drawings. The general problem is that the computer is
presented with an arbitrary scene, composed of arbitrary surfaces, each
of an arbitrary colour and illuminated in an arbitrary way. With so much
variation possible it is extremely difficult to reconstruct the scene cor-
rectly from a single image taken from only one perspective. One of the
problems in doing so is that different spatial arrangements of an object
can give rise to the same two-dimensional image. Another problem is
that the appearance of an object is influenced by the material of which
its surface is made, not to mention the question of clouds or haze obscur-
ing part of a view and the angle of a light source creating or otherwise
affecting shadows. And to add to all these difficulties, no matter what
perspective is shown, some of the geometrical properties of a scene will
be lost—parallel lines can turn into convergent lines, angles can change,
and lines that are equal in length can appear to be of different lengths. All