Environmental Engineering Reference
In-Depth Information
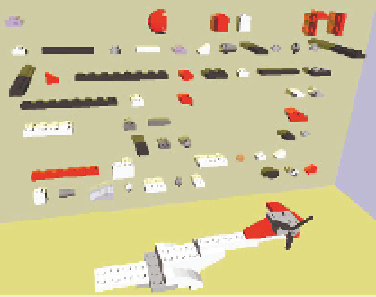
Fig. 5. Virtual assembly scene. Trainees have to grasp the correct piece from the backwall and
place it in its correct position in the model.
The platform also provides different utilities to configure the training process. For example,
to start the training session at any step, to select the constraint in the order of the sequence
of steps (the steps can be done in any flexible order or must follow a fixed order), to allow
making steps automatically so the trainees can jump the easy steps and focus on the complex
ones or even to “undo steps” to repeat difficult steps. The system logs information about the
training sessions in order to analyze the performance of the trainee. Then, this information
can be processed for extracting different performance measures. At the end of the session, the
system provides a performance report containing information about:
•
Step performance
: time, information about how the step was performed (correct step,
without errors but with aids, with errors but without aids, with errors and aids, not
finished, performed automatically) and number of times that the help was needed to finish
the step and number or errors.
•
Overall performance
: total time, description of the sequence done, total number of correct
steps, total number of steps without errors but with aids, total number of steps with errors
but without aids, total number of steps with errors and aids, total number of steps not
finished, total number of steps performed automatically by the system, total number of
times that the help was needed, total number or errors, and total number of consecutive
steps done correctly.
3.2 Architecture and components
The multimodal interaction of the trainees with the virtual scene involves different activities,
such as haptic interaction, collision detection, visual feedback, commands management, etc.
All these activities must be synchronized and executed with the correct frequency in order
to provide the trainees with a consistent and proper interaction. Therefore, a multi-threaded
solution with 3 threads is employed (see Figure 6):
1. The
haptic thread
analyzes the user position, with the frequency requested by the haptic
device (usually 1 Khz), in order to calculate the force that will be replicated to the trainee.
It also manages the communication between the system and the haptic device through a
special API (Application Programming Interface): the API-HAL (Haptic Abstract Library).
This API makes the software application independent from the haptic device drivers
and allows easily changing the system configuration, and using different haptic devices
according to the task demands.