Environmental Engineering Reference
In-Depth Information
safety constraints). In this way, the trainees can interact and manipulate the components of the
virtual scenario, sensing the collisions with the other components and simulating assembly
and disassembly operations. In addition, the new system provides different multimodal aids
and learning strategies that help and guide the trainees during their training process. One
of the main features of this system is its flexibility to adapt itself to the task demands and to
the trainees preferences and needs. In this way the sytem can be used with different types of
haptic devices and allows undertaking mono-manual and bimanual operations in assembly
and disassembly tasks with or without tools.
3.1 Set-up of the system
The new multimodal training system consists of a screen displaying a 3-D graphical scene,
one haptic device and the training software, which simulates and teaches assembly and
disassembly procedural tasks. As it will be discussed later, thanks to a special interface the
platform is flexible enough to use different types of haptic devices with different features
(large or small workspace, one or two contact points, different DoFs, etc.) depending on the
task demands.
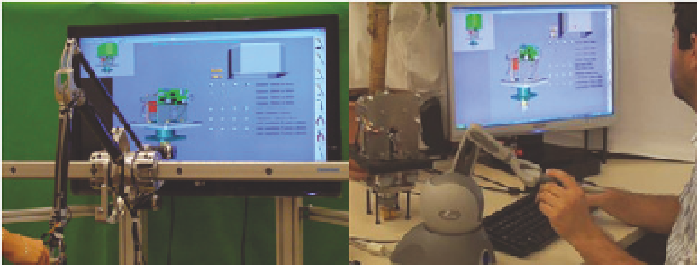
Figure 4 shows the training system in which trainees have to grasp the stylus of the haptic
device with one hand to interact with the virtual pieces of the scene. Besides, trainees can use
the keyboard to send commands to the application (e.g. grasp a piece, change the view, ...).
Fig. 4. Multimodal Training System. On the left, the system is configured to use a large
workspace haptic device. On the right, the system is configured to use a desktop (small
wokspace) haptic device.
The 3D-graphical scene is divided into two areas. The first area, the
repository
,isaback-wall,
that contains the set of pieces to be assembled (in the case of an assembly task). The second
area,
the working area
, is where trainees have to assemble/disassemble the machine or model.
On the right part of the screen there is a
tools menu
with the virtual tools that can be chosen
to accomplish the different operations of the task. When the user is closed to a tool icon, the
user can “grasp” the corresponding tool and manipulate it. Figure
5
shows one example of
a virtual assembly scene of the experimental task described in the next Section. Using the
haptic device, the trainees must grasp the pieces from the repository (with or without tool)
and move them to place them in its correct position in the model. Along the training session,
the system provides different types of information about the task, such as: information about
the “task progress”, technical description of the components/tools and critical information of
the operations. Critical information can also be sent through audio messages. When trainees
make an error during the task, the system also displays a message with the type of error and
plays a sound to indicate the fault.