Environmental Engineering Reference
In-Depth Information
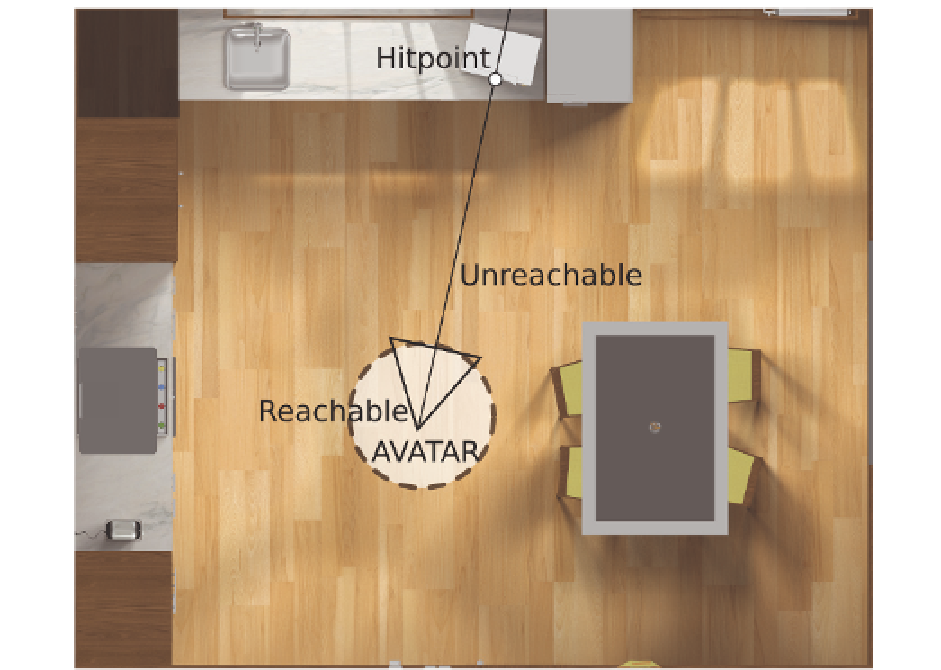
Fig. 6. VE example that shows the avatar's position and the first intersection of the
view-vector with the scene. In this case the hit-point is the microwave, and it is not reachable
for interaction at the current position.
user's target, the system has the ability to compute the best position to reach it, computing the
best path to arrive there and the best camera's orientation.
When the user does a mouse click, the system detects the first object that intersects the view
vector (hit-point). Figure 6 shows an example where the hit-point is a microwave. The object
is reachable if the distance between its position and the avatar is smaller than a fixed value. In
this case, the interaction with the object is performed. When the distance is greater, the system
interprets that the user wants to perform the interaction, and it moves the avatar to a position
that allows the interaction with the object.
The system uses the object's position to determine the best avatar's location to reach it. This
location lays on the grid of the VE's floor. Figure 7 shows a grid example of a kitchen. The cells
of the floor can be classified as occupied (red), unreachable (orange) or reachable (green). The
unreachable cells are free cells where the avatar cannot go, because it would collide with other
elements of the VE. Thus, the avatar is only allowed to be in a position inside reachable cells.
The system uses the grid to determine which of the reachable cells is the best to interact with
the target object. The naive strategy consists of finding the closest cell to the target. However,
it does not take into account the possible occlusions. Therefore, we choose the closest cell