Information Technology Reference
In-Depth Information
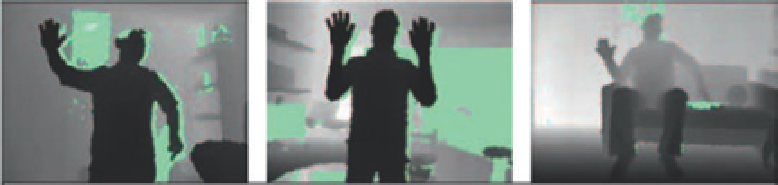
Fig. 14.5. Some example images from
the Kinect camera. Nearby points are
dark gray, and farther points are light
gray. In the green areas, no infrared data
was captured.
estimation by removing a few big problems. You no longer have to worry
about what is in the background since it is just further away. The color and
texture of clothing, skin and hair are all normalized away. The size of the
person is known, as the depth camera is calibrated in meters.
7
The Xbox team had built an impressive human body-tracking system using
the three-dimensional information but had been unable to make the system
powerful enough for realistic game-playing situations. Shotton described the
problem as follows:
The Xbox group also came to us with a prototype human tracking algorithm
they had developed. It worked by assuming it knew where you were and
how fast you were moving at time t, estimating where you were going to be
at time t + 1, and then refining this prediction by repeatedly comparing a
computer graphics model of the human body at the prediction, to the actual
observed depth image on the camera and making small adjustments. The
results of this system were incredibly impressive: it could smoothly track your
movements in real-time, but it had three limitations. First, you had to stand in
a particular “T”-pose so it could lock on to you initially. Second, if you moved
too unpredictably, it would lose track, and as soon as that happened all bets
were off until you returned to the T-pose. In practice this would typically
happen every five or ten seconds. Third, it only worked well if you had a
similar body size and shape as the programmer who had originally designed it.
Unfortunately, these limitations were all show-stoppers for a possible product.
8
Shotton, with his colleagues Andrew Fitzgibbon and Andrew Blake, brain-
stormed about how they might solve these problems. The researchers knew
that they needed to avoid making the assumption that, given the body posi-
tion or “pose” in the previous video frame just 1/30 of a second ago, one could
find the current body position by trying “nearby” poses. With rapid motions,
this assumption just does not work. What was needed was a detection algo-
rithm for a single three-dimensional image that could take the raw depth mea-
surements and convert them into numbers that represented the body pose.
However, to include all possible combinations of poses, shapes, and sizes the
researchers estimated it would require approximately 10
13
different images.
This number was far too large for any matching process to run in real time on
the Xbox hardware. Shotton had the idea that instead of recognizing entire
natural objects, his team would create an algorithm that recognized the dif-
ferent body parts, such as “left hand” or “right ankle.” The team designed a
pattern of thirty-one different body parts and then used a
decision forest -
a
collection of
decision trees
- as a classification technique to predict the proba-
bility that a given pixel belonged to a specific part of the body (
Fig. 14.6
). By
Fig. 14.6. Color-coded pattern of
thirty-one different body parts used by
the body pose algorithm developed by
Microsoft researchers for the Kinect
Xbox application.

Search WWH ::

Custom Search