Biomedical Engineering Reference
In-Depth Information
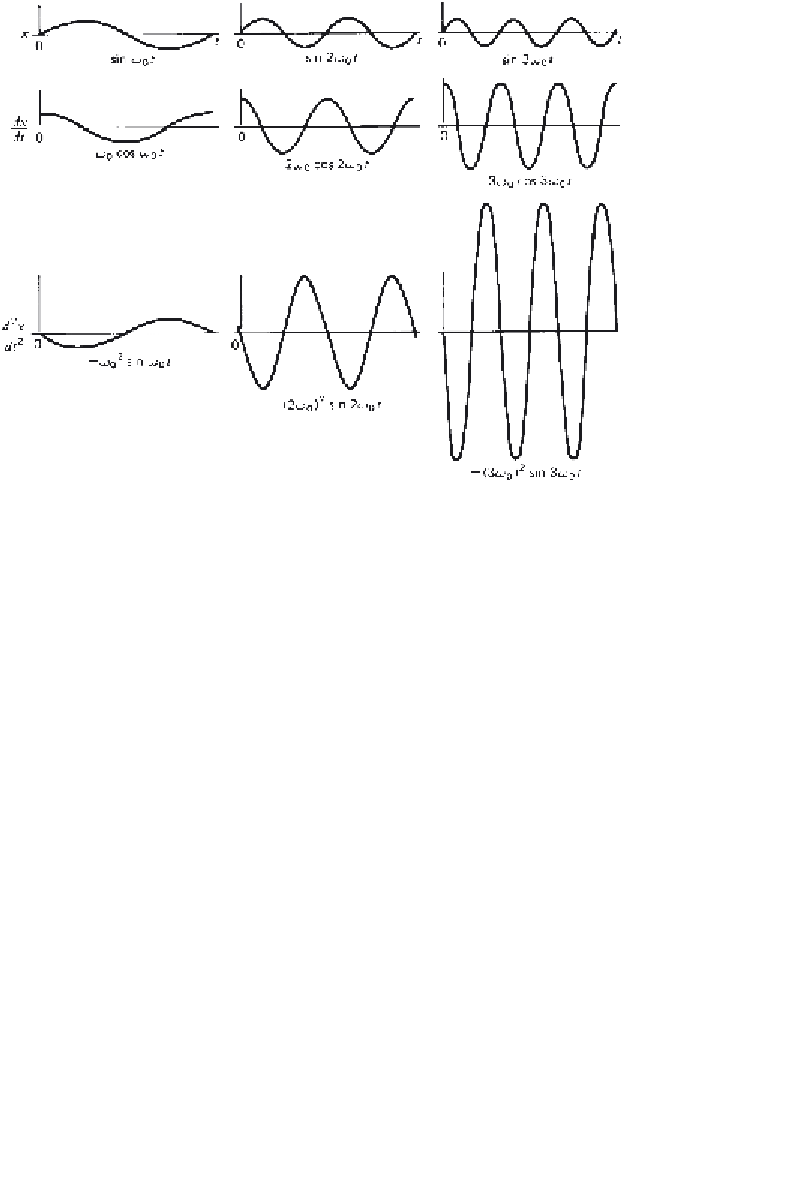
Figure 3.17
Relative amplitude changes as a result of the time differentiation of
signals of increasing frequency. The first derivative increases the amplitude proportional
to frequency; the second derivative increases the amplitude proportionally to frequency
squared. Such a rapid increase has severe implications in calculating accelerations when
the original displacement signal has high-frequency noise present.
itself (in this case, walking). Sources of noise were noted in Section 3.4.1,
and if the total effect of all these errors is random, then the true signal will
have an added random component. Usually the random component is high
frequency, as is borne out in Figure 3.16. Here you can see evidence of
higher-frequency components extending up to the 20th harmonic, which was
the highest frequency analyzed.
3.4.3 Problems of Calculating Velocities and Accelerations
The presence of this higher-frequency noise is of considerable importance
when we consider the problem of trying to calculate velocities and accel-
erations. Consider the process of time differentiation of a signal containing
additive higher-frequency noise. Suppose that the signal can be represented
byasummationof
N
harmonics:
N
x
=
X
n
sin
(n
ω
0
t
+
θ
n
)
(3.3)
=
n
1









Search WWH ::

Custom Search