Biomedical Engineering Reference
In-Depth Information
RHC
RTO
LHC
COP
COM
LTO
RHC
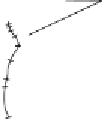
Figure 11.7
Trajectories of the COM and COP for two steps during steady state
walking. Plotted on the COM trajectory is shown when key stance events occur: LTO
- left toe off, LHC - left heel contact, RTO - right toe off, RHC - right heel contact.
Note that the COM never passes within the base of support of either foot. See the text
for details of the balance challenges to the inverted pendulum model. (Reproduced
with permission from Winter, D. A.
Biomechanics and Motor Control of Human Gait:
Normal, Elderly and Pathological
, 2nd Edition, Waterloo Biomechanics, 1991.)
coordination of the A/P muscles (plantarflexors/dorsiflexors) and the M/L
control (hip abductors/adductors). The goal of these motor patterns during
initiation is to change from the quiet standing pattern to the steady state
COP/COM patterns, as described in Section 11.3.1, in as short a time as
possible.
The first major study to track COP/COM profiles during gait initiation
yielded the patterns shown in Figure 11.8 (Jian et al., 1993). Justification
for the inverted pendulum model during this study [Equation (11.3)] yielded
correlations that averaged - 0.94 in both the A/P and M/L directions. The


















Search WWH ::

Custom Search