Biomedical Engineering Reference
In-Depth Information
z
z
′
z
″′
″′
x
z
″
x
″
x
′
x
y
y
′
y
″′
y
″
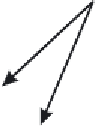
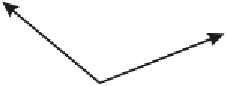
Figure 7.1
Cardan sequence of three rotations about the
x
,
y
,
z
axes. The first rotation,
θ
1
, about the
x
axis to get
x
,
y
,
z
; the second rotation,
θ
2
, about the new
y
axis to get
x
,
y
,
z
, and the final rotation,
θ
3
, about the new
z
axis to get the desired
x
,
y
,
z
.
point will have coordinates
x
1
,
y
1
,
z
1
in the
x
,
y
,
z
axis system. Based on the
rotation
θ
1
:
x
1
=
x
0
y
1
=
y
0
cos
θ
1
+
z
0
sin
θ
1
z
1
=−
y
0
sin
θ
1
+
z
0
cos
θ
1
Using the shorthand notation
c
1
=
cos
θ
1
and
s
1
=
sin
θ
1
, in matrix notation
this may now be written as:
⎡
⎤
⎡
⎤
⎡
⎤
⎡
⎤
x
1
y
1
z
1
10 0
0
x
0
y
0
z
0
x
0
y
0
z
0
⎣
⎦
=
⎣
⎦
⎣
⎦
=
⎣
⎦
c
1
s
1
[
1
]
(7.1)
0
−
s
1
c
1
After the second rotation
θ
2
about
y
, this point will have coordinates
x
2
,
y
2
,
z
2
in the
x
,
y
,
z
axis system.
⎡
⎤
⎡
⎤
⎡
⎤
⎡
⎤
x
2
y
2
z
2
c
2
0
−
s
2
01 0
s
2
x
1
y
1
z
1
x
1
y
1
z
1
⎣
⎦
=
⎣
⎦
⎣
⎦
=
⎣
⎦
[
2
]
(7.2)
0
c
2
Finally, the third rotation
θ
3
about
z
yields the coordinates
x
3
,
y
3
,
z
3
in the
x
,
y
,
z
axis system.
⎡
⎤
⎡
⎤
⎡
⎤
⎡
⎤
x
3
y
3
z
3
c
3
s
3
0
x
2
y
2
z
2
x
2
y
2
z
2
⎣
⎦
=
⎣
⎦
⎣
⎦
=
⎣
⎦
−
s
3
c
3
0
001
[
3
]
(7.3)









































































Search WWH ::

Custom Search