Biomedical Engineering Reference
In-Depth Information
at Time 4 is to decrease his or her COP by reduced plantarflexor activation.
Now
Wg
>
Rp
and
α
will reverse, and, after a period of time,
ω
will decrease
and reverse, and the body will return to the original conditions, as seen at
Time 5. From this sequence of events relating COP to COM, it is evident
that the plantarflexors/dorsiflexors vary the net ankle moment to control the
COP and thereby regulate the body's COM. However, it is apparent that
the COP must be continuously moving anterior and posterior of the COM;
thus, the dynamic range of the COP must be somewhat greater than that of
the COM. If the COM were allowed to move within a few centimeters of the
toes, it is possible that a corrective movement of the COP to the extremes
of the toes might not be adequate to reverse
ω
. Here, the subject would be
forced to take a step forward to arrest a forward fall.
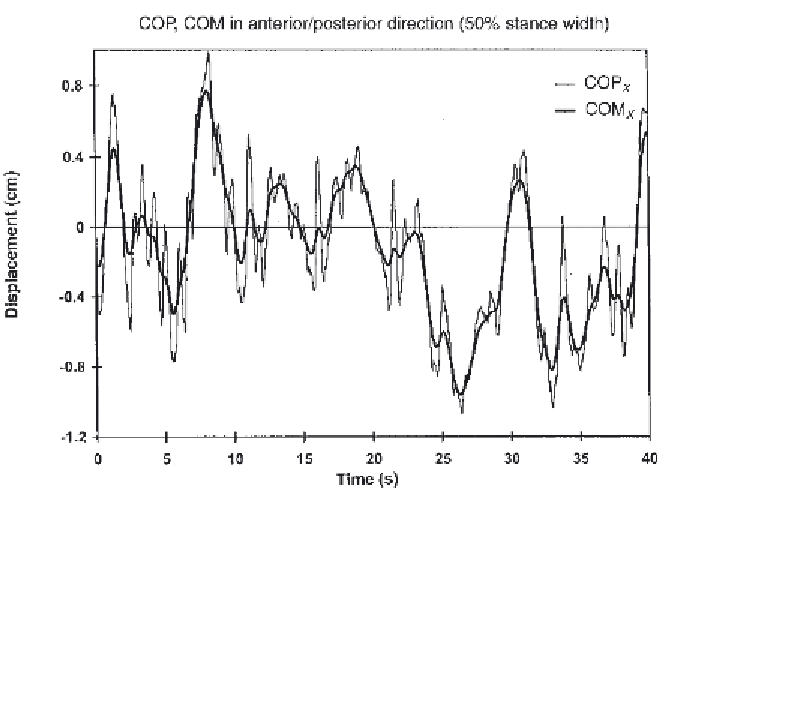
Figure 5.17 is a typical 40-s record of the center of pressure (COP
x
)
and center of mass (COM
x
) in the anterior/posterior direction of an adult
subject standing quietly. Note that both signals are virtually in phase and that
COP is slightly greater than COM. As was seen in the discussion regarding
Figure 5.16, the COP must move ahead of and behind the COM in order to
Figure 5.17
Typical 40-s record of the total body center of mass (COM
x
) and center
of pressure (COP
x
) in the anterior/posterior direction during quiet standing. The COP
amplitude exceeds that of the COM, and the reversals of direction of the COM (i.e.,
high
+
ve
or -
ve
accelerations) are caused by overshoots of COP, as predicted by the
discussion related to Figure 5.16.









Search WWH ::

Custom Search