Biomedical Engineering Reference
In-Depth Information
complex free-body diagram must be used, and the techniques and examples
are described in Section 5.3.
5.1 BASIC LINK-SEGMENT EQUATIONS — THE FREE-BODY
DIAGRAM*
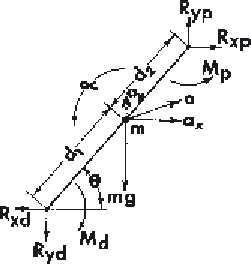
Each body segment acts independently under the influence of reaction forces
and muscle moments, which act at either end, plus the forces due to gravity.
Consider the planar movement of a segment in which the kinematics, anthro-
pometrics, and reaction forces at the distal end are known (see Figure 5.5).
Known
a
x
,a
y
=
acceleration of segment COM
θ
=
angle of segment in plane of movement
α
=
angular acceleration of segment in plane of movement
R
xd
,R
yd
=
reaction forces acting at distal end of segment, usually
determined from a prior analysis of the proximal forces
acting on distal segment
M
d
=
net muscle moment acting at distal joint, usually determined
from an analysis of the proximal muscle acting on distal
segment
Unknown
R
xp
,R
yp
=
reaction forces acting at proximal joint
M
p
=
net muscle moment acting on segment at proximal joint
Figure 5.5
Complete free-body diagram of a single segment, showing reaction and
gravitational forces, net moments of force, and all linear and angular accelerations.
∗
Representative paper: Bresler and Frankel, 1950.









Search WWH ::

Custom Search