Biomedical Engineering Reference
In-Depth Information
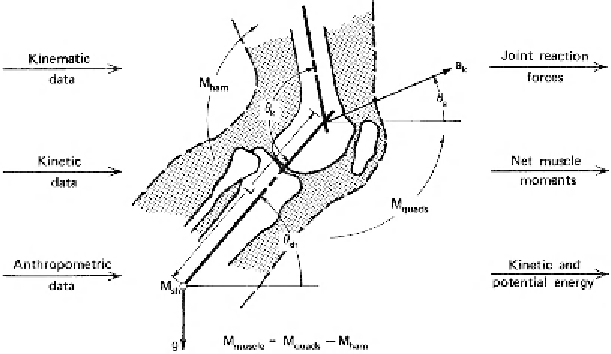
Figure 5.1
Schematic diagram of the relationship between kinematic, kinetic, and
anthropometric data and the calculated forces, moments, energies, and powers using an
inverse solution of a link-segment model.
5.0.1 Link-Segment Model Development
The validity of any assessment is only as good as the model itself. Accurate
measures of segment masses, centers of mass (COMs), joint centers, and
moments of inertia are required. Such data can be obtained from statistical
tables based on the person's height, weight, and, sometimes, sex, as was
detailed in Chapter 4. A limited number of these variables can be measured
directly, but some of the techniques are time-consuming and have limited
accuracy. Regardless of the source of the anthropometric data, the following
assumptions are made with respect to the model:
1. Each segment has a fixed mass located as a point mass at its COM
(which will be the center of gravity in the vertical direction).
2. The location of each segment's COM remains fixed during the move-
ment.
3. The joints are considered to be hinge (or ball-and-socket) joints.
4. The mass moment of inertia of each segment about its mass center (or
about either proximal or distal joints) is constant during the movement.
5. The length of each segment remains constant during the movement (e.g.,
the distance between hinge or ball-and-socket joints remains constant).
Figure 5.2 shows the equivalence between the anatomical and the
link-segment models for the lower limb. The segment masses
m
1
,
m
2
, and
m
3
are considered to be concentrated at points. The distance from the proximal
joint to the mass centers is considered to be fixed, as are the length of the










Search WWH ::

Custom Search