Biomedical Engineering Reference
In-Depth Information
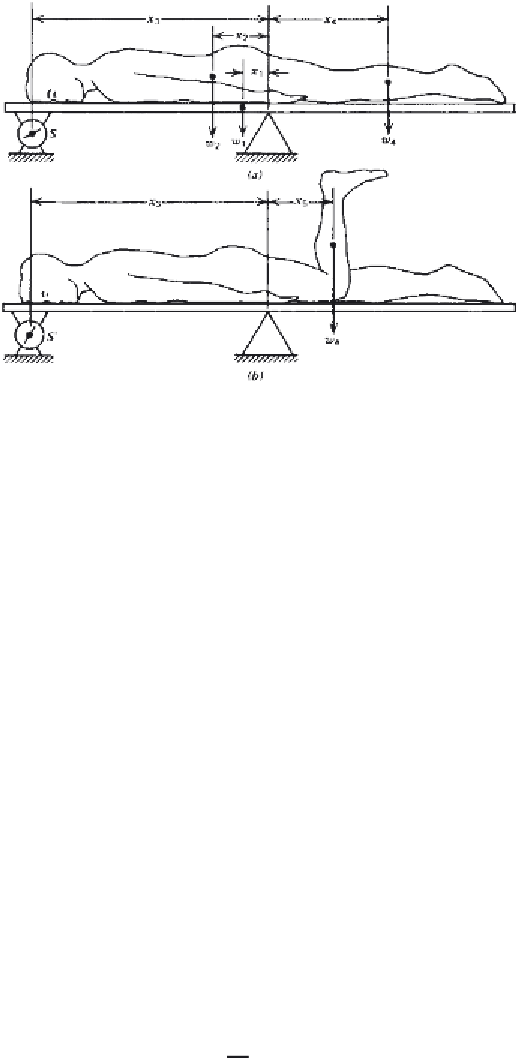
Figure 4.7
Balance board technique. (
a
) In vivo determination of mass of the location
of the anatomical center of mass of the body. (
b
) Mass of a distal segment. See text
for details.
4.2.3 Moment of Inertia of a Distal Segment
The equation for the moment of inertia, described in Section 4.1.5, can be
used to calculate
I
at a given joint center of rotation.
I
is the constant of
proportionality that relates the joint moment to the segment's angular accel-
eration, assuming that the proximal segment is fixed. A method called the
quick release experiment
can be used to calculate
I
directly and requires the
arrangement pictured in Figure 4.8. We know that
I
=
M /α
, so if we can
measure the moment
M
that causes an angular acceleration
α
, we can calcu-
late
I
directly. A horizontal force
F
pulls on a convenient rope or cable at a
distance
y
1
from the joint center and is restrained by an equal and opposite
force acting on a release mechanism. An accelerometer is attached to the leg
at a distance
y
2
from the joint center. The tangential acceleration
a
is related
to the angular acceleration of the leg
α
by
a
=
y
2
α
.
With the forces in balance as shown, the leg is held in a neutral position and
no acceleration occurs. If the release mechanism is actuated, the restraining
force suddenly drops to zero and the net moment acting on the leg is
Fy
1
,
which causes an instantaneous acceleration
α
.
F
and
a
can be recorded on a
dual-beam storage oscilloscope; most pen recorders have too low a frequency
response to capture the acceleration impulse. The moment of inertia can now
be calculated,
M
α
=
Fy
1
y
2
a
I
=
(4.15)










Search WWH ::

Custom Search